


Tutoriel de sauvetage pour une lunette inondée
Votre lunette astronomique a pris l’eau ? Découvrez dans ce tutoriel comment sauver votre optique après une infiltration d’eau entre les lentilles. Ce guide pratique, basé sur une expérience réelle, vous explique pas à pas comment sécher l’instrument, éliminer la condensation et prévenir l’apparition de champignons grâce à un traitement UV. Apprenez les gestes qui sauvent pour éviter des dommages irréversibles à votre précieux matériel !

Améliorer les détails d’une image avec Photoshop
Plusieurs méthodes pour améliorer les détails d’une image avec Photoshop, tant dans les zones lumineuses que dans les zones sombres, avec la création de masques adaptés.

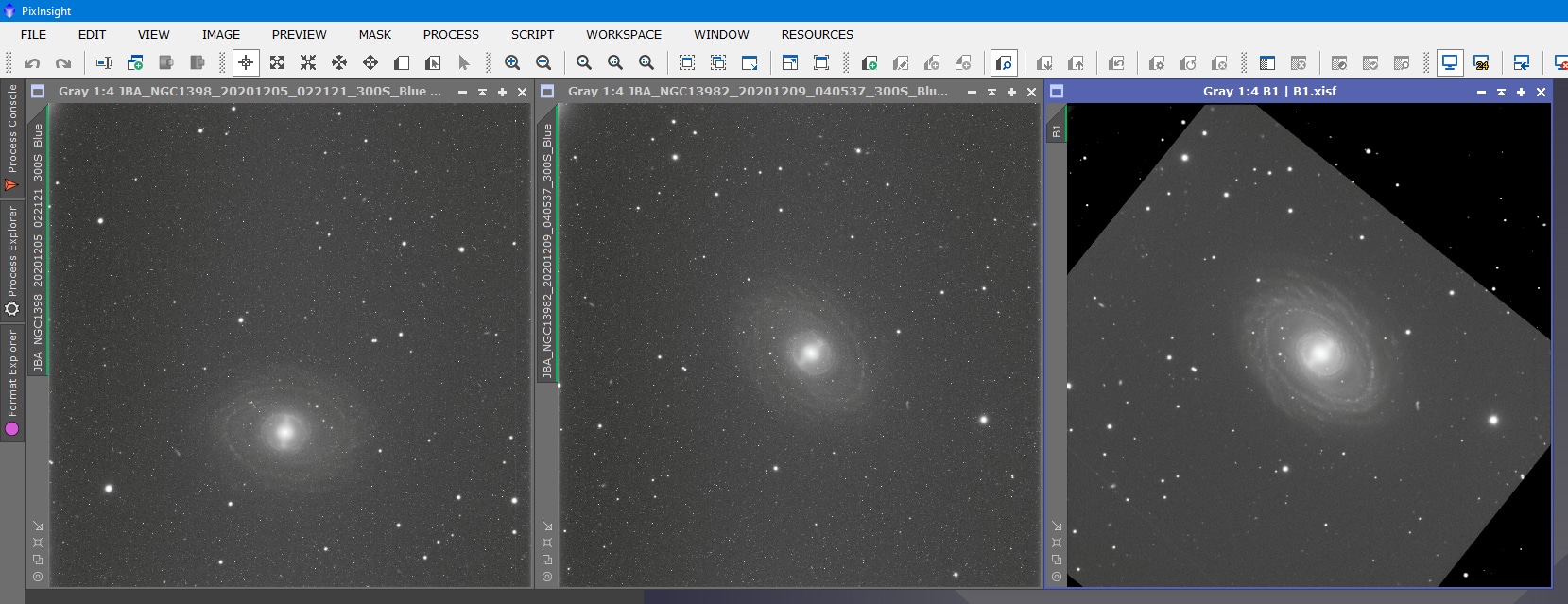
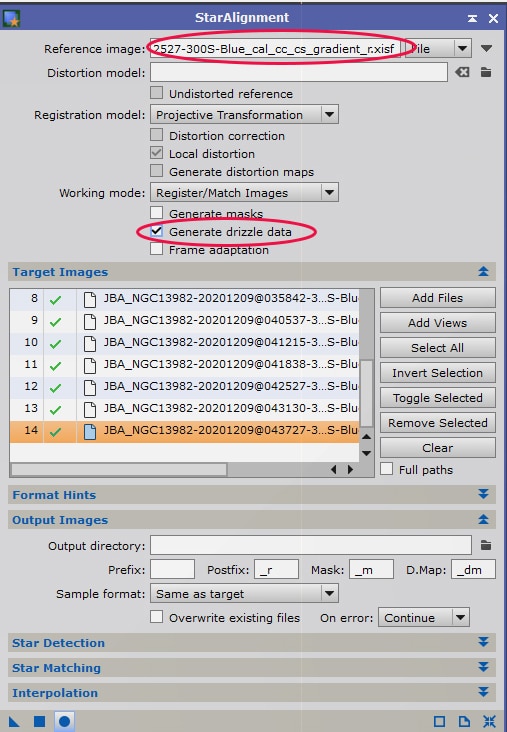
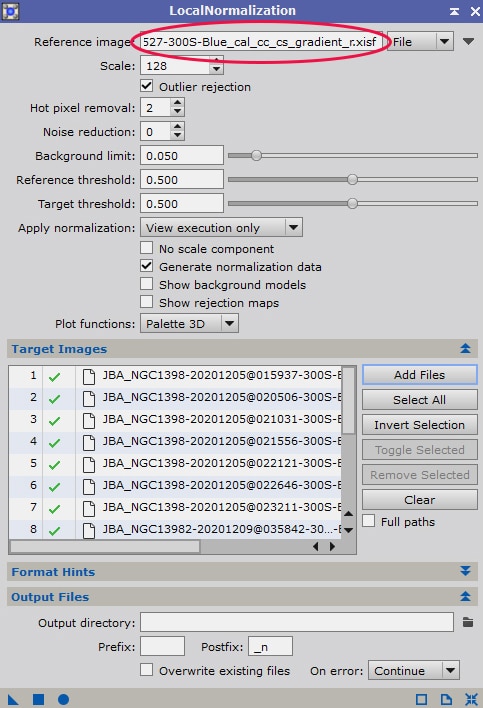
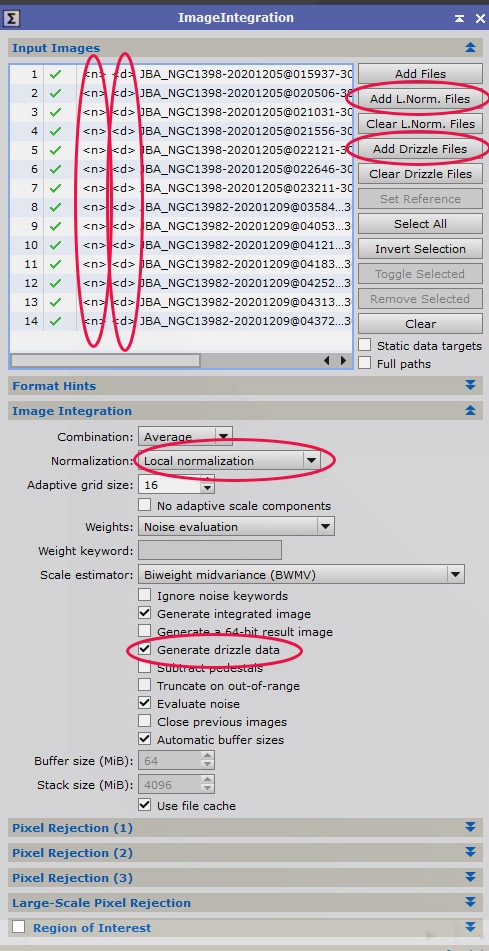
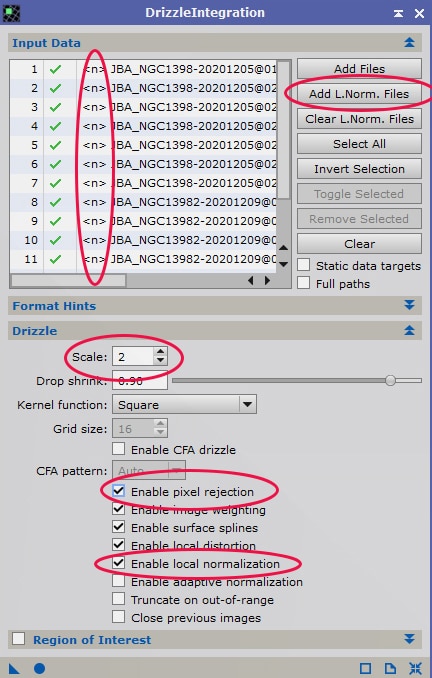
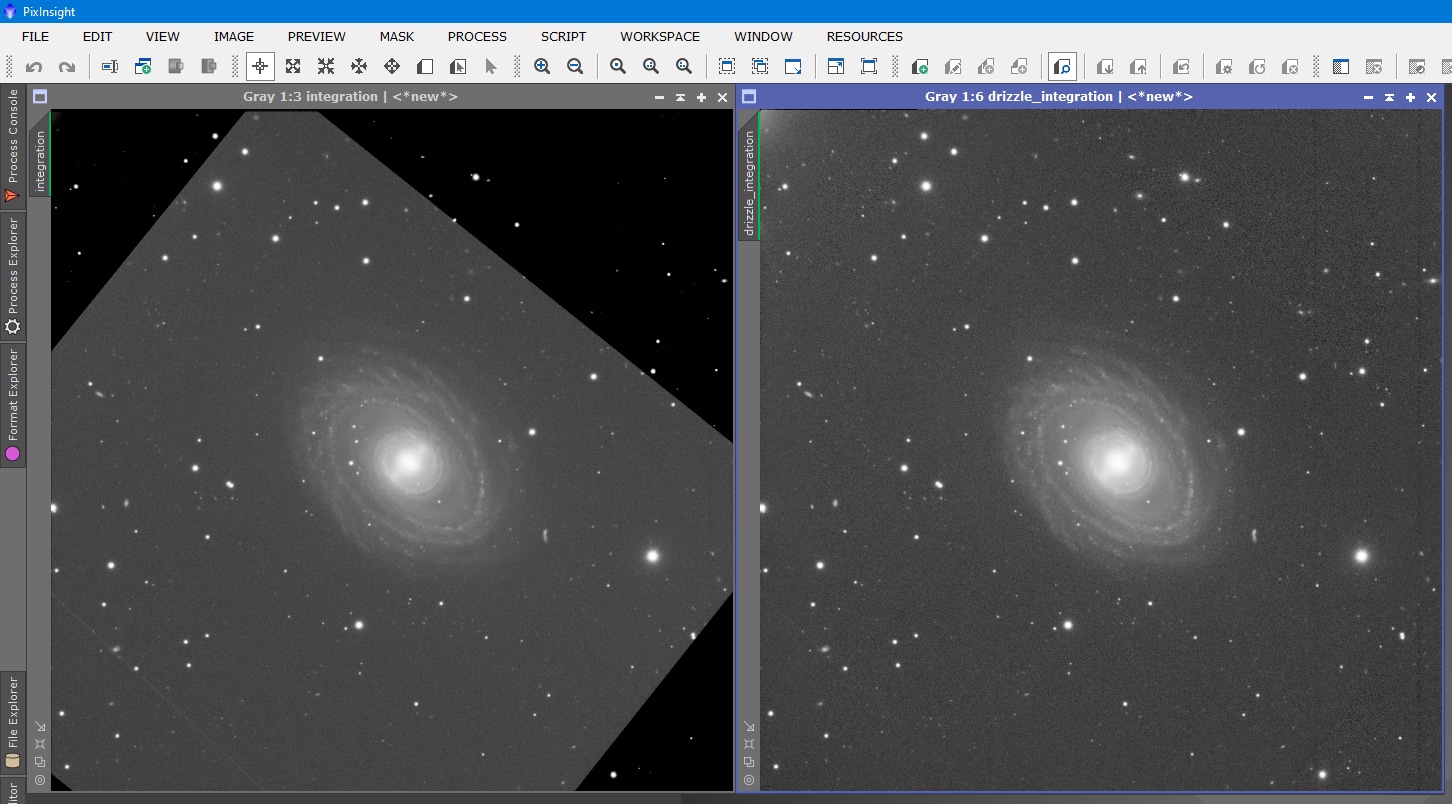
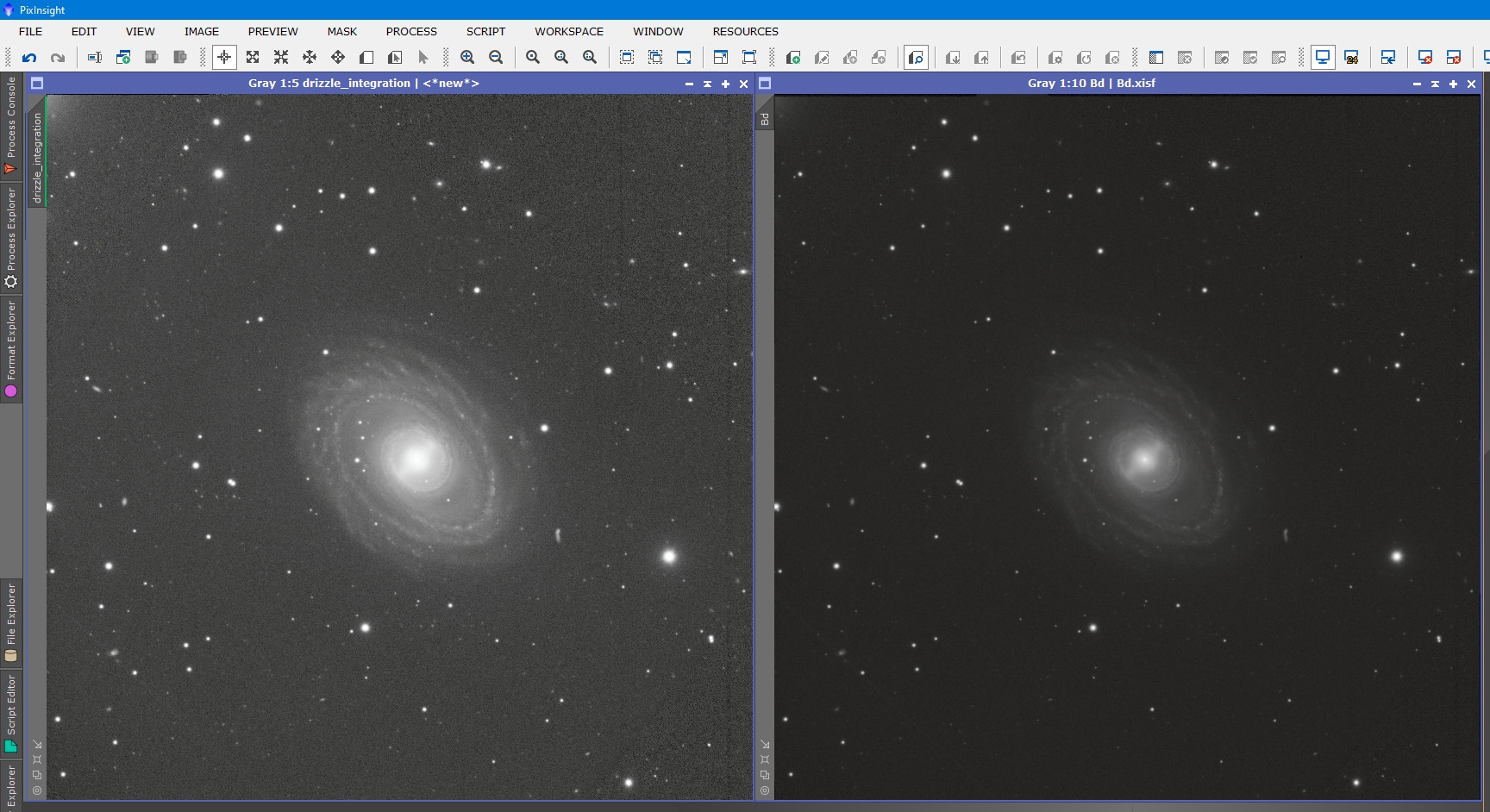
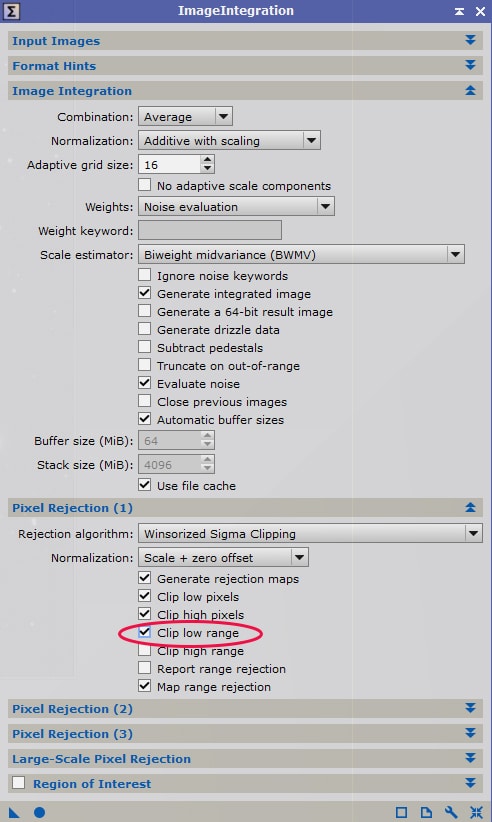
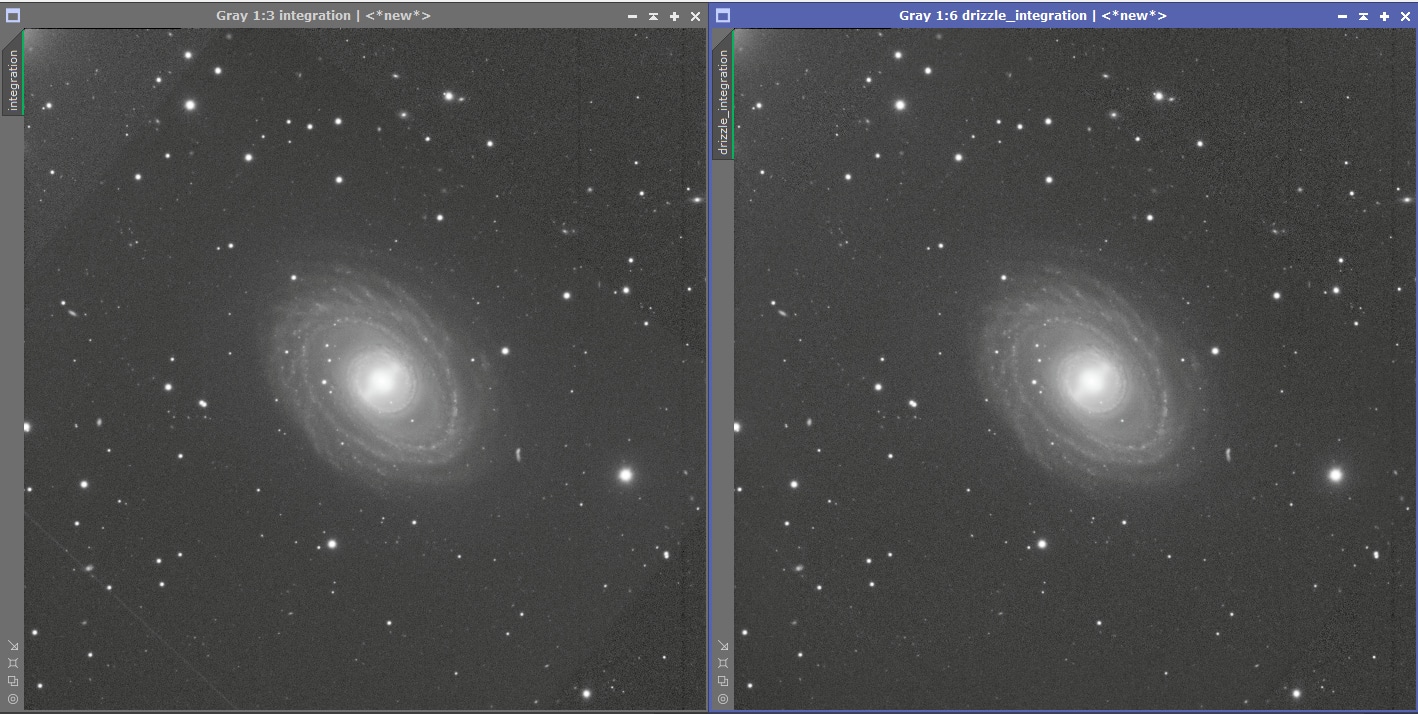
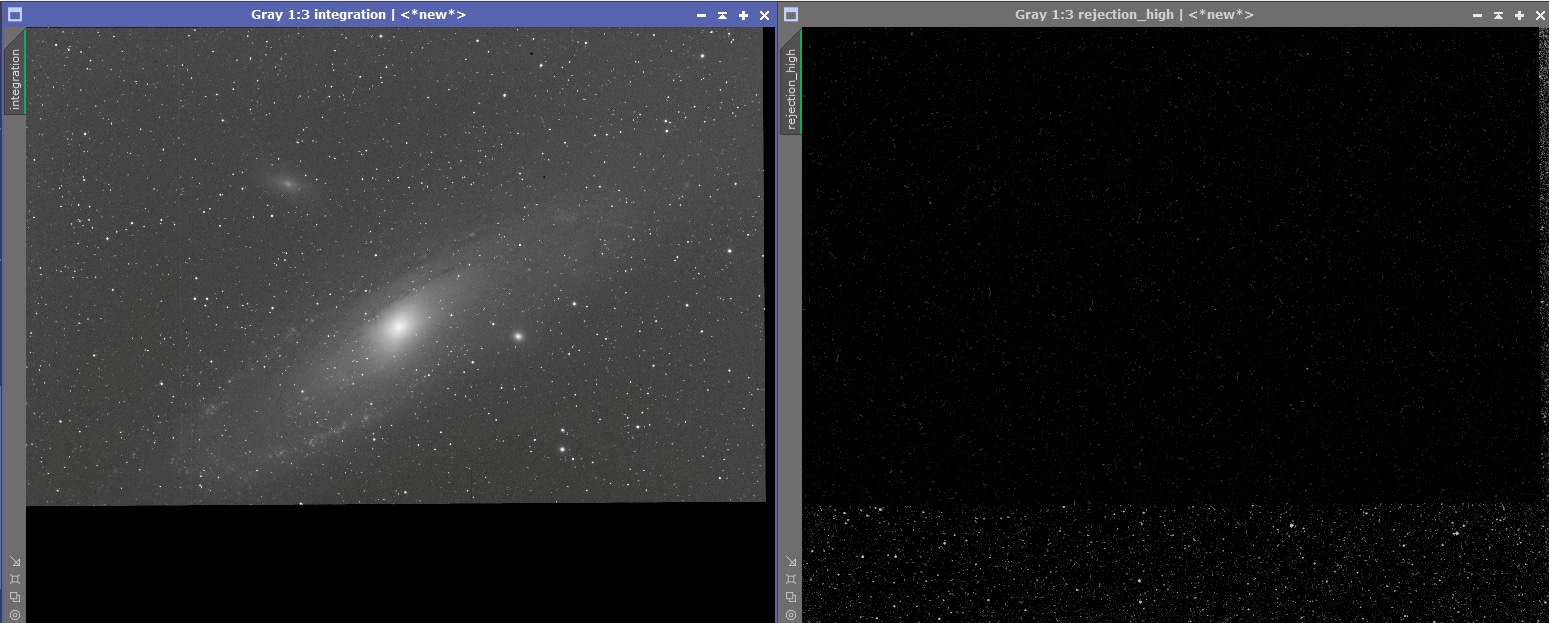
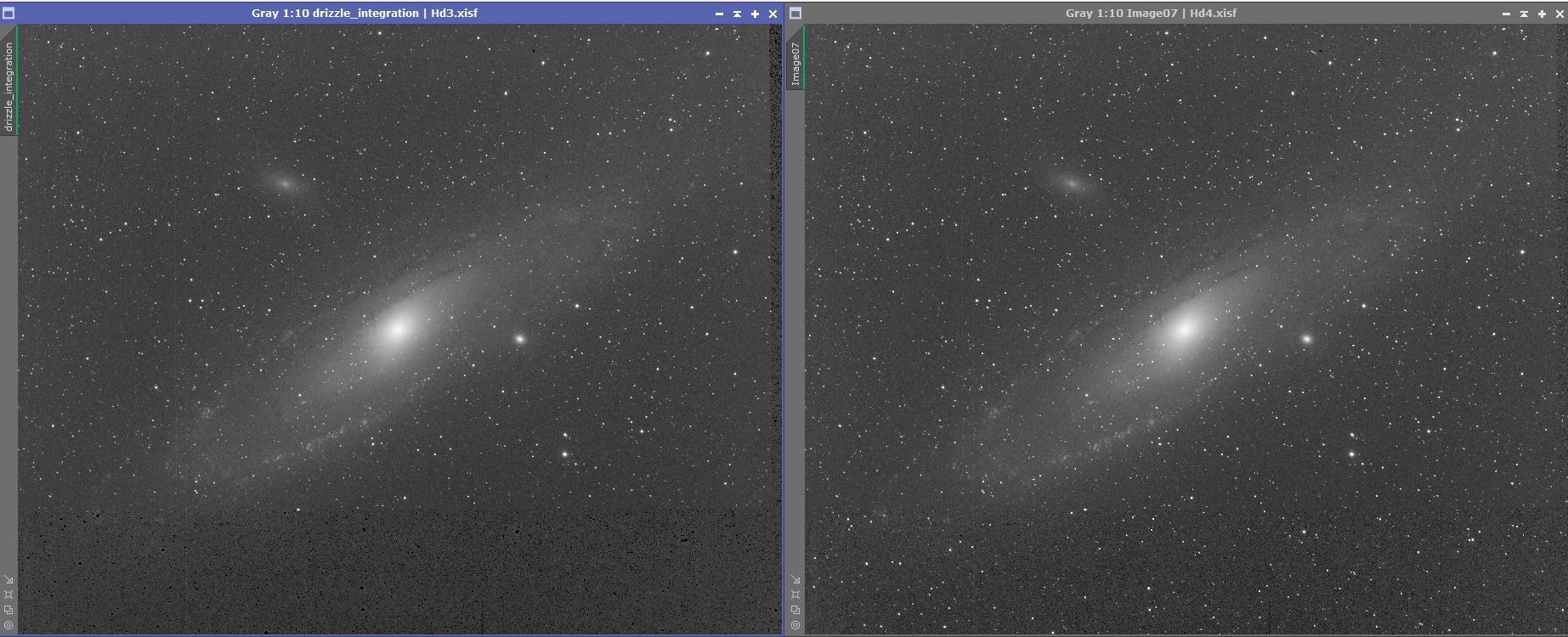
Améliorer les détails d’une image avec Pixinsight
Plusieurs méthodes pour améliorer les détails d’une image avec Pixinsight, tant dans les zones lumineuses que dans les zones sombres, avec la création de masques adaptés.