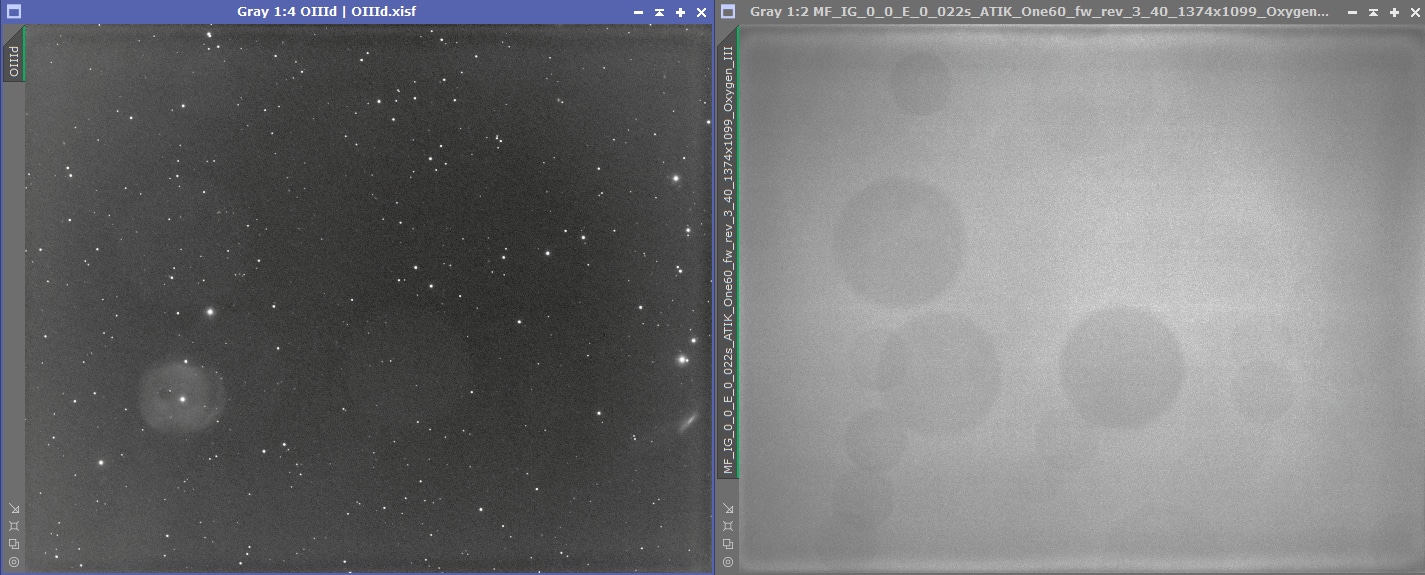
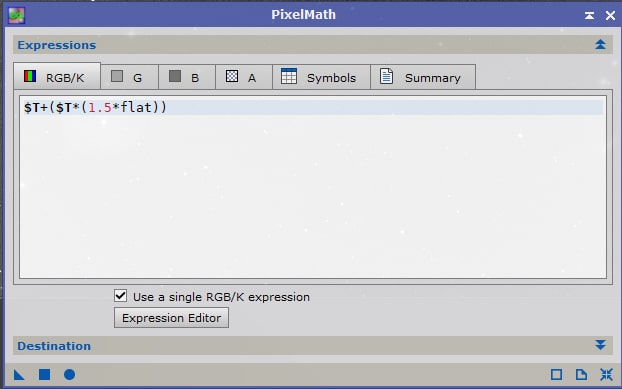


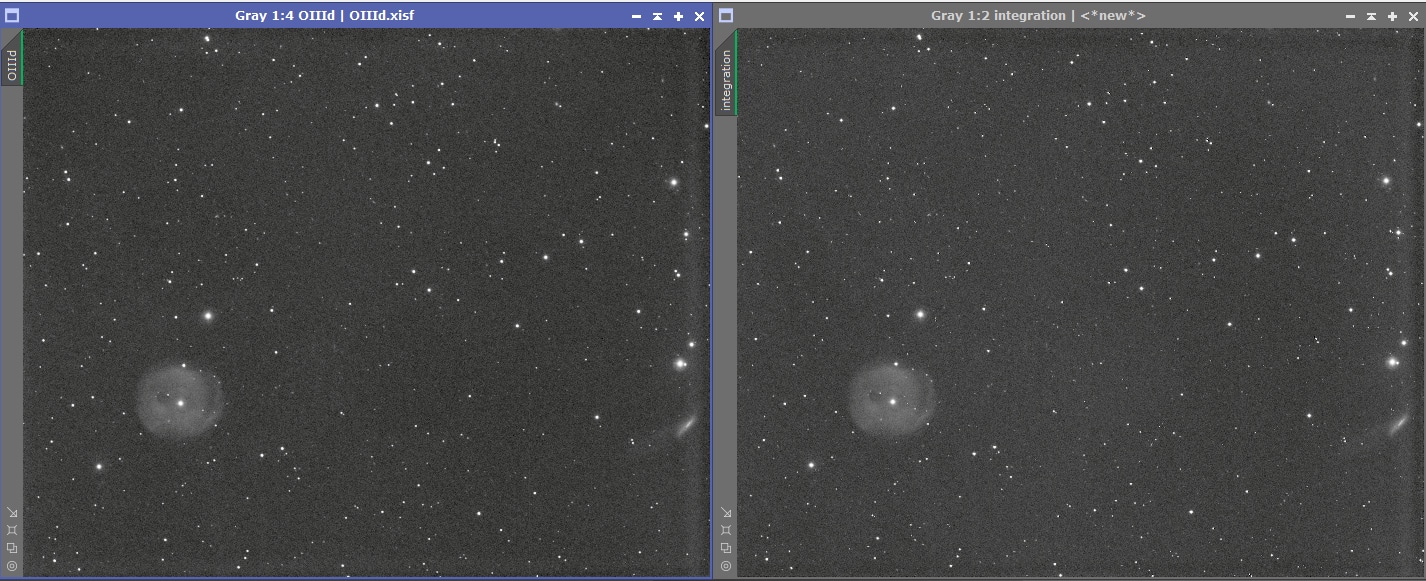

Correction globale de flats défectueux
Il arrive que les flats ne remplissent pas parfaitement leur rôle (sur ou sous-correction…). Il est toutefois possible de corriger ces défauts après l’étape de prétraitement.
Correction de défauts dans le fond de ciel (reflets, flats…)
Certains défauts sont particulièrement gênants lors du traitement (reflets, résidus de flats…). Le plus simple est de les corriger sur l’image linéaire avec Pixinsight.
Résolution astrométrique et annotation d’une image
Réaliser la résolution astrométrique d’une image et annoter celle-ci afin d’identifier les objets visibles, avec Pixinsight.