















Le vol de matériel astro : comment s’en prémunir et réagir ?
Ces derniers mois, les vols de matériels d’astronomie se sont multipliés de manière inquiétante. Faut-il y voir des coïncidences ou l’apparition d’un nouveau phénomène délinquant ciblant spécifiquement ces matériels souvent onéreux ? Existe t-il des manières de s’en prémunir ? Que faire en cas de vol ? On fait le point dans cet article.

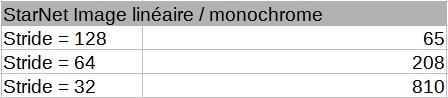
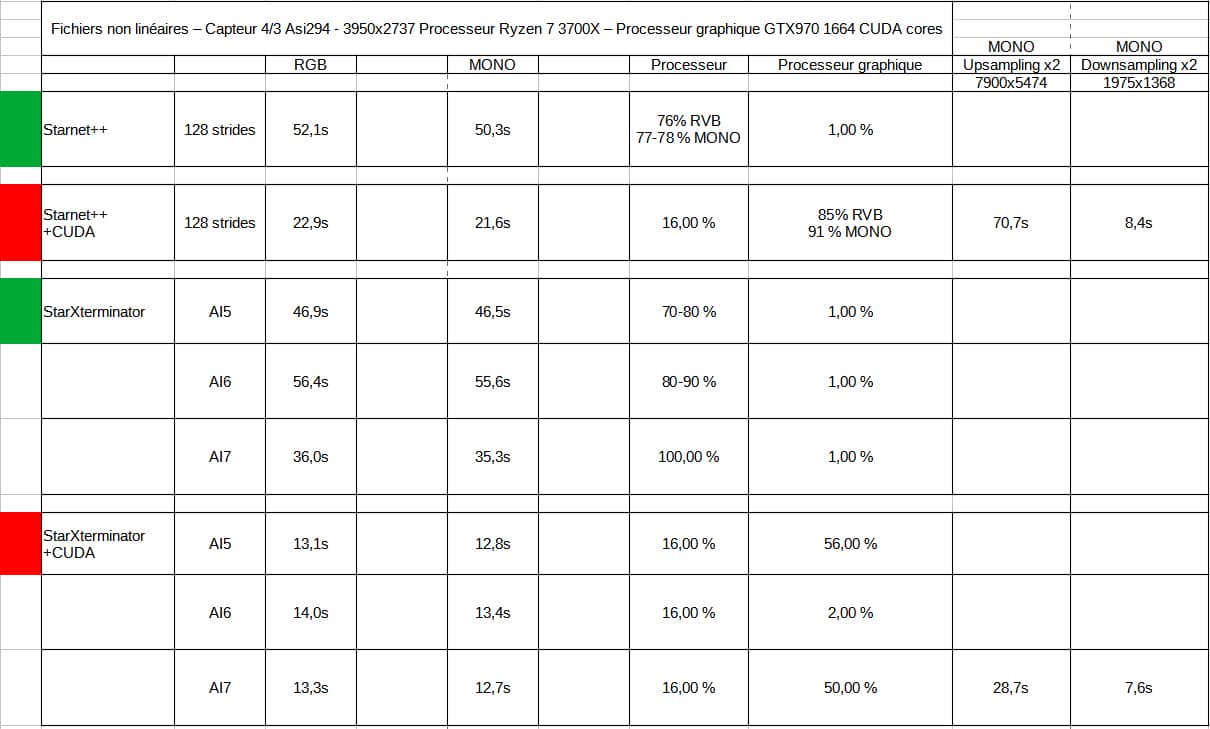
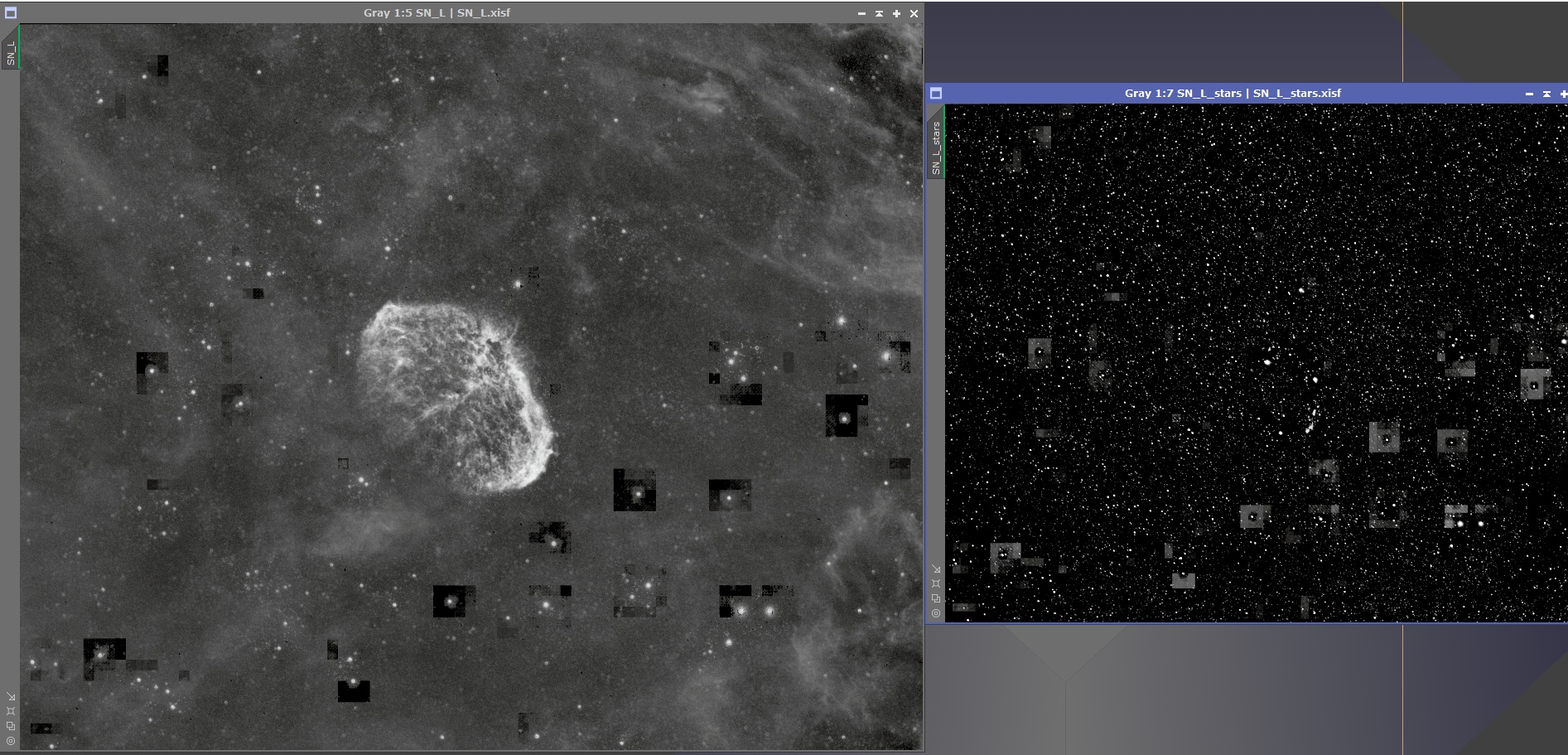
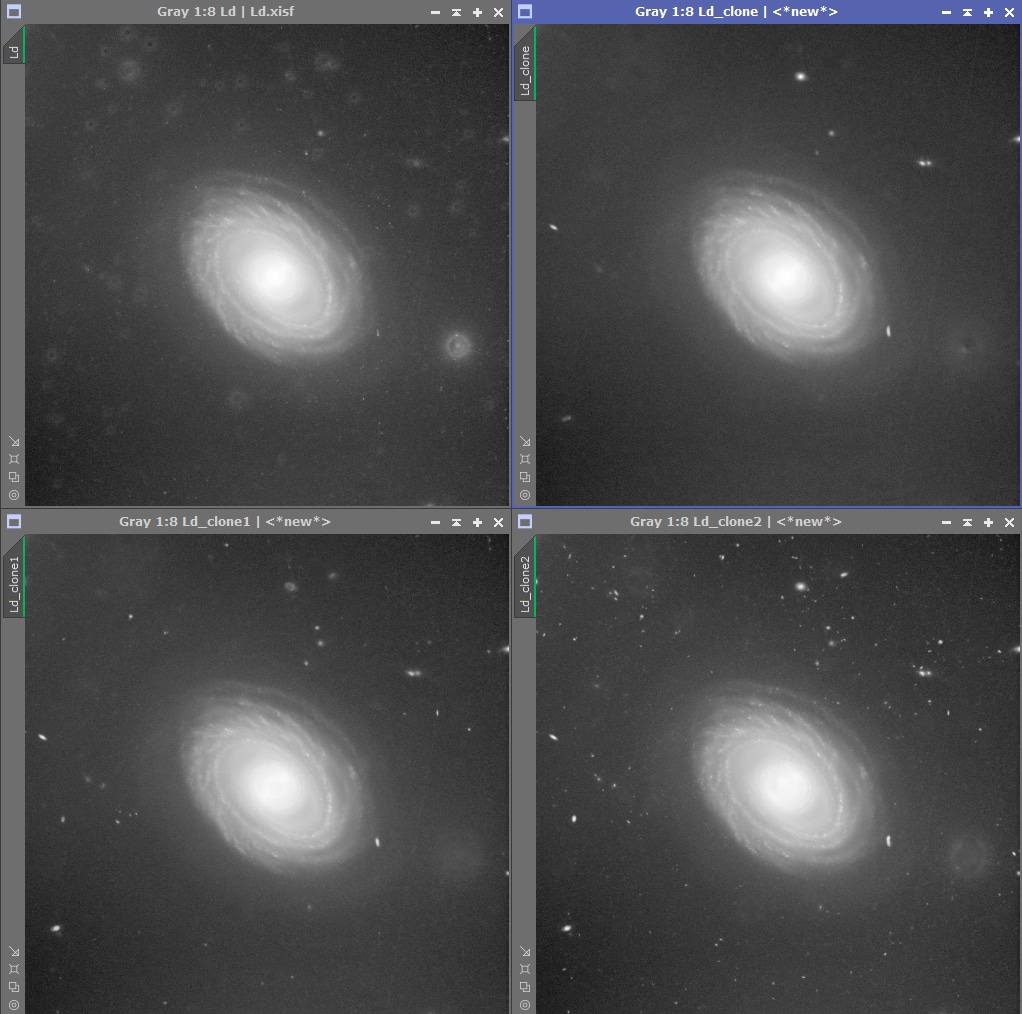
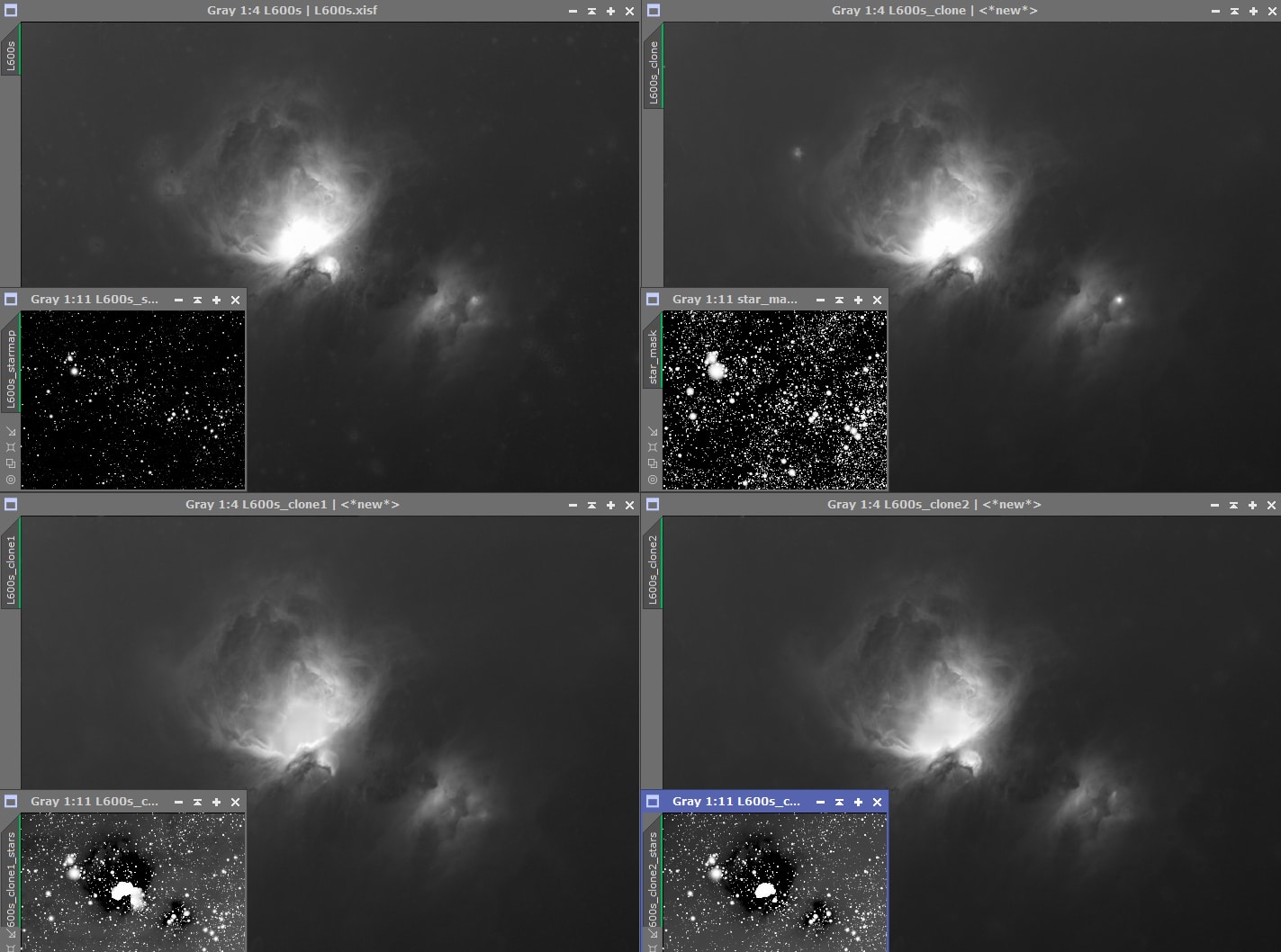
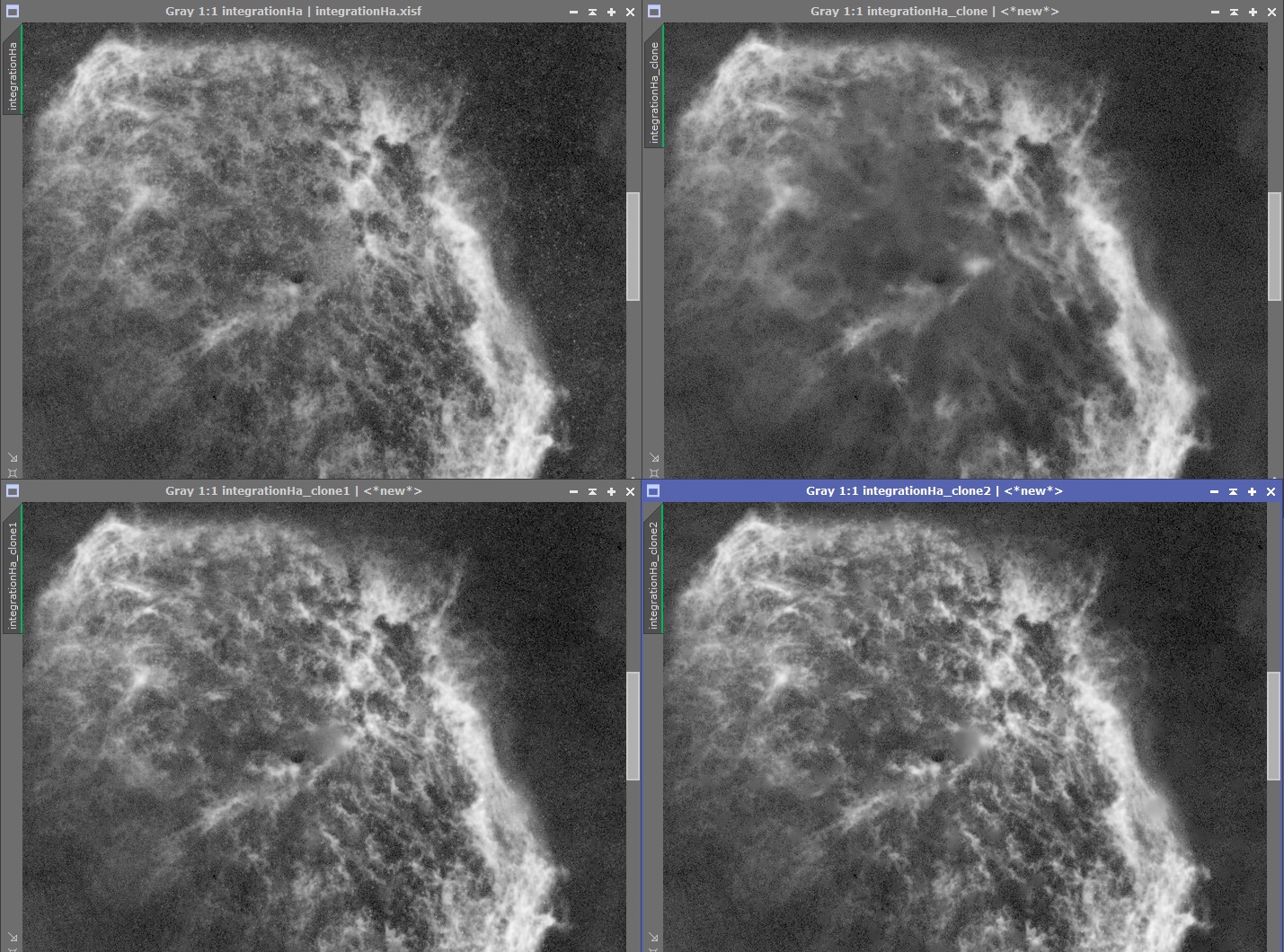
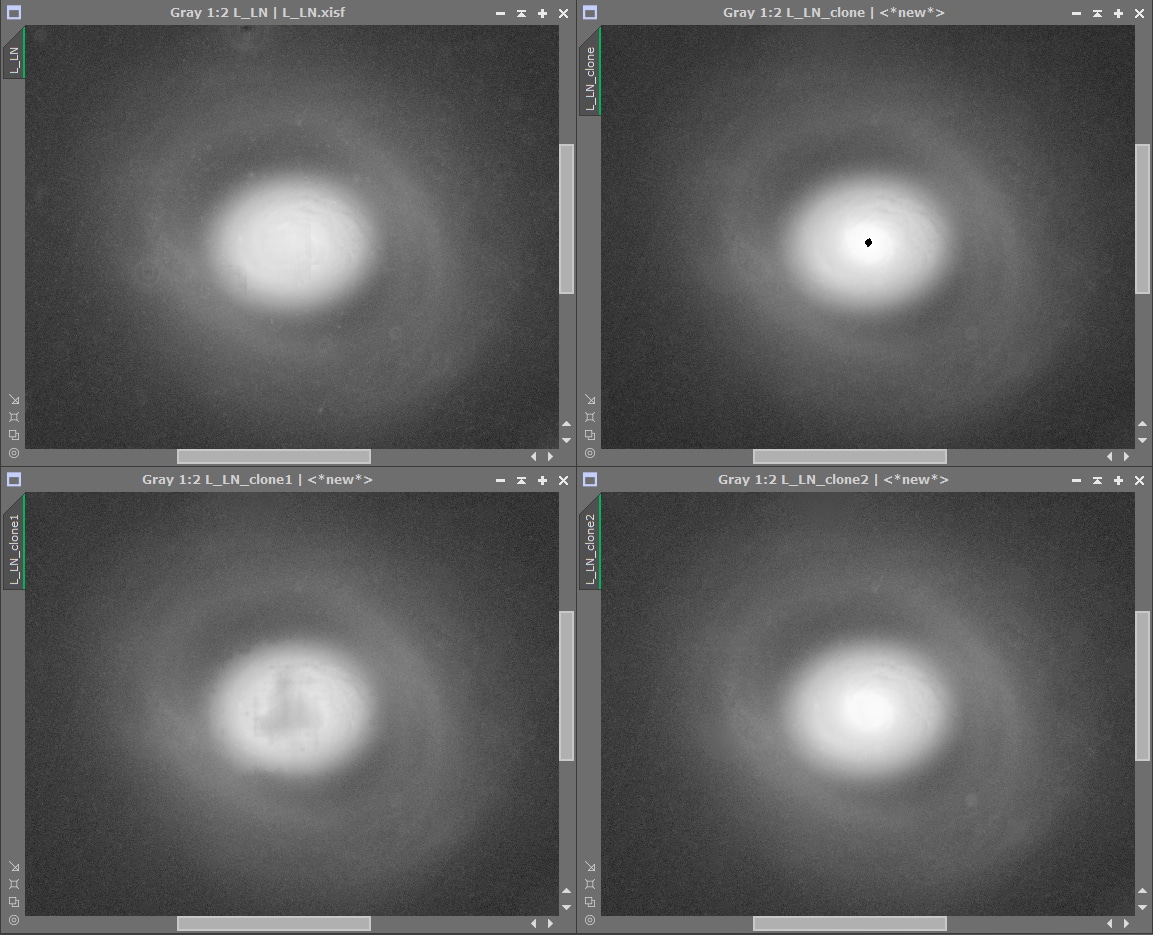
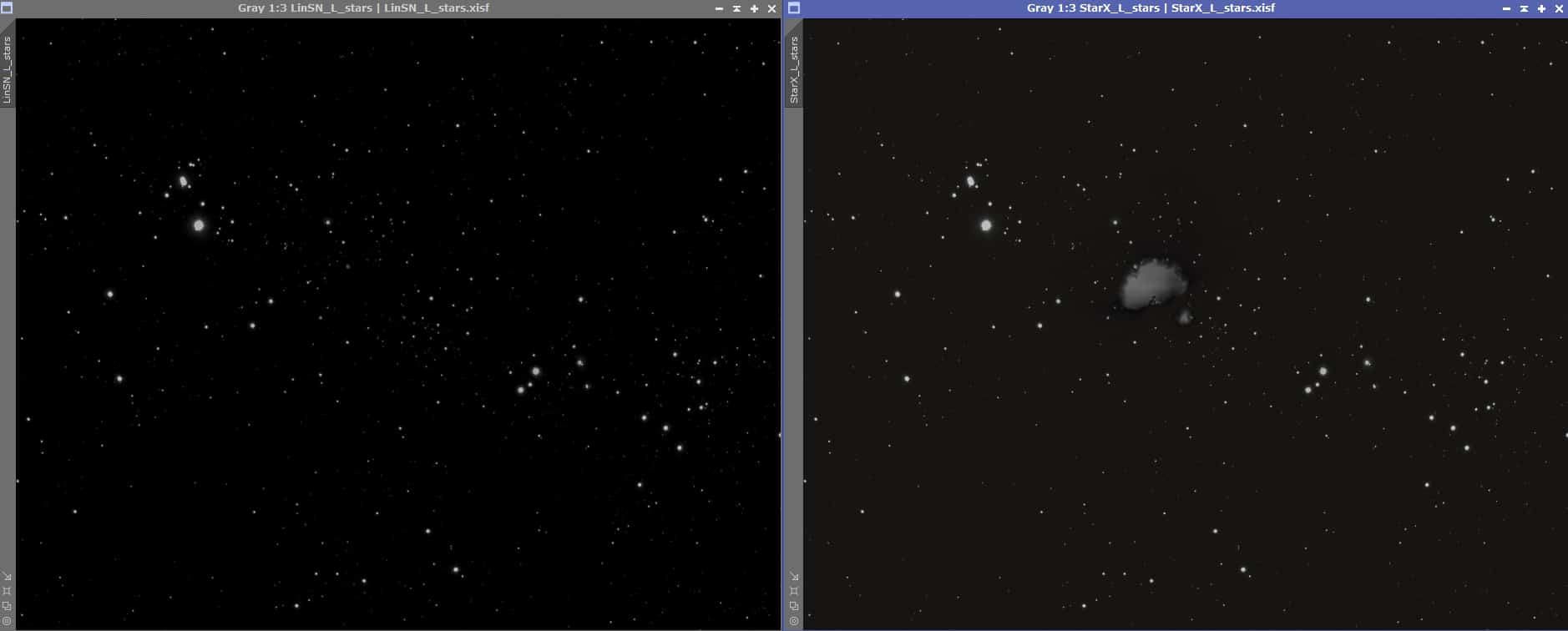
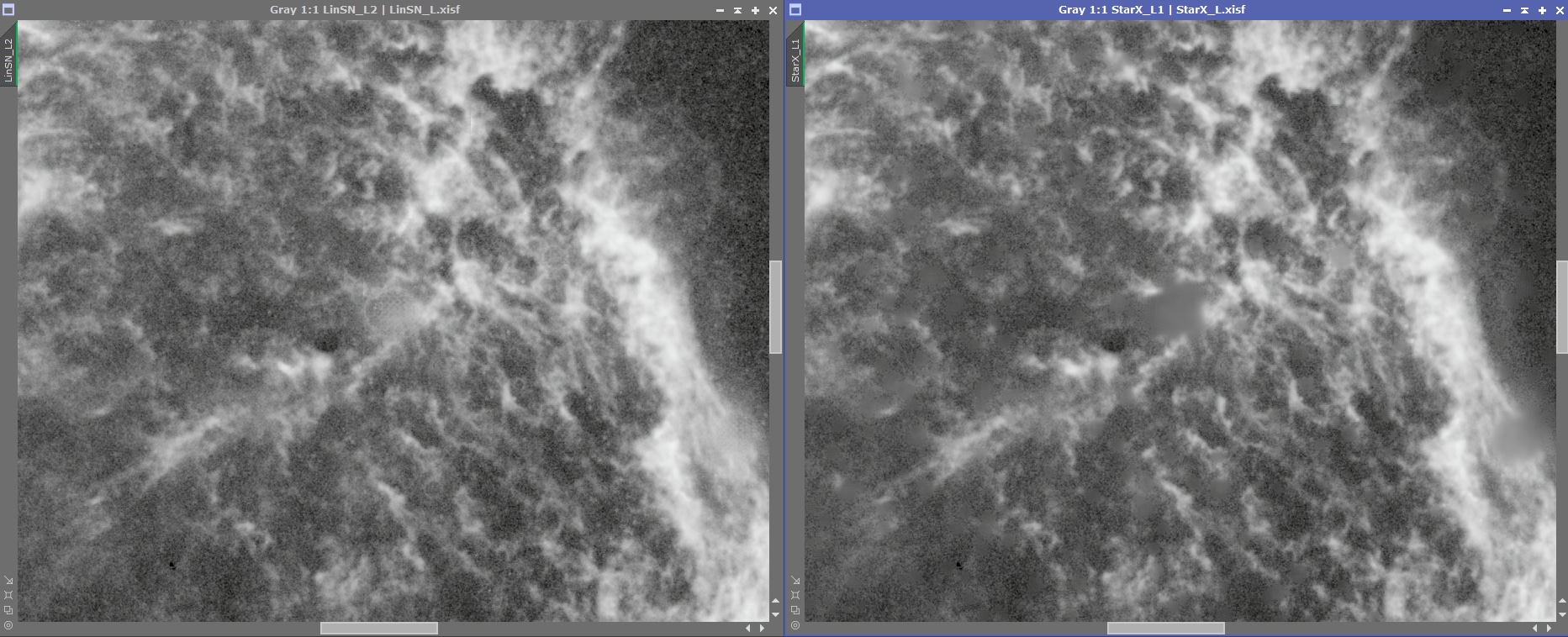
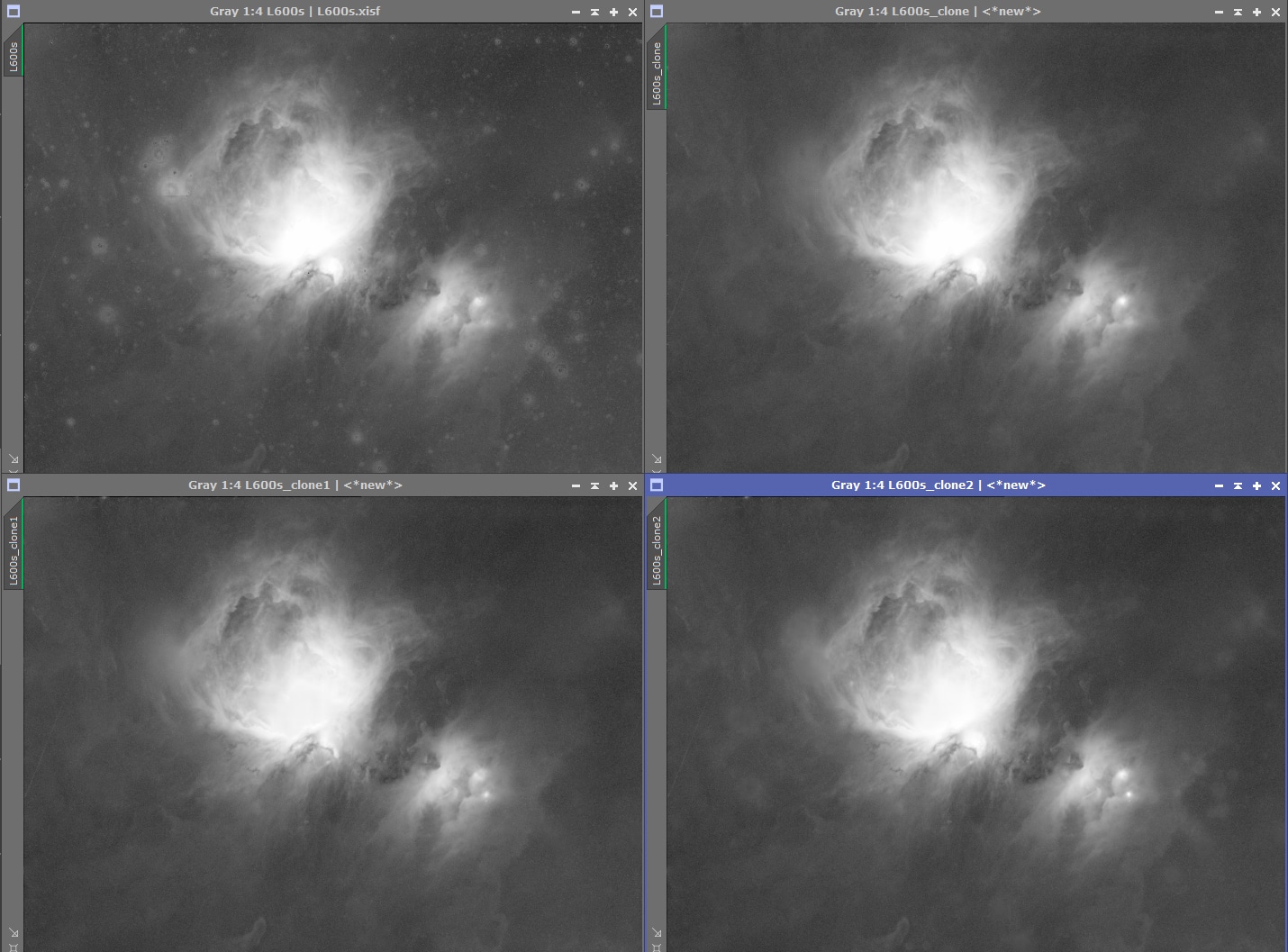
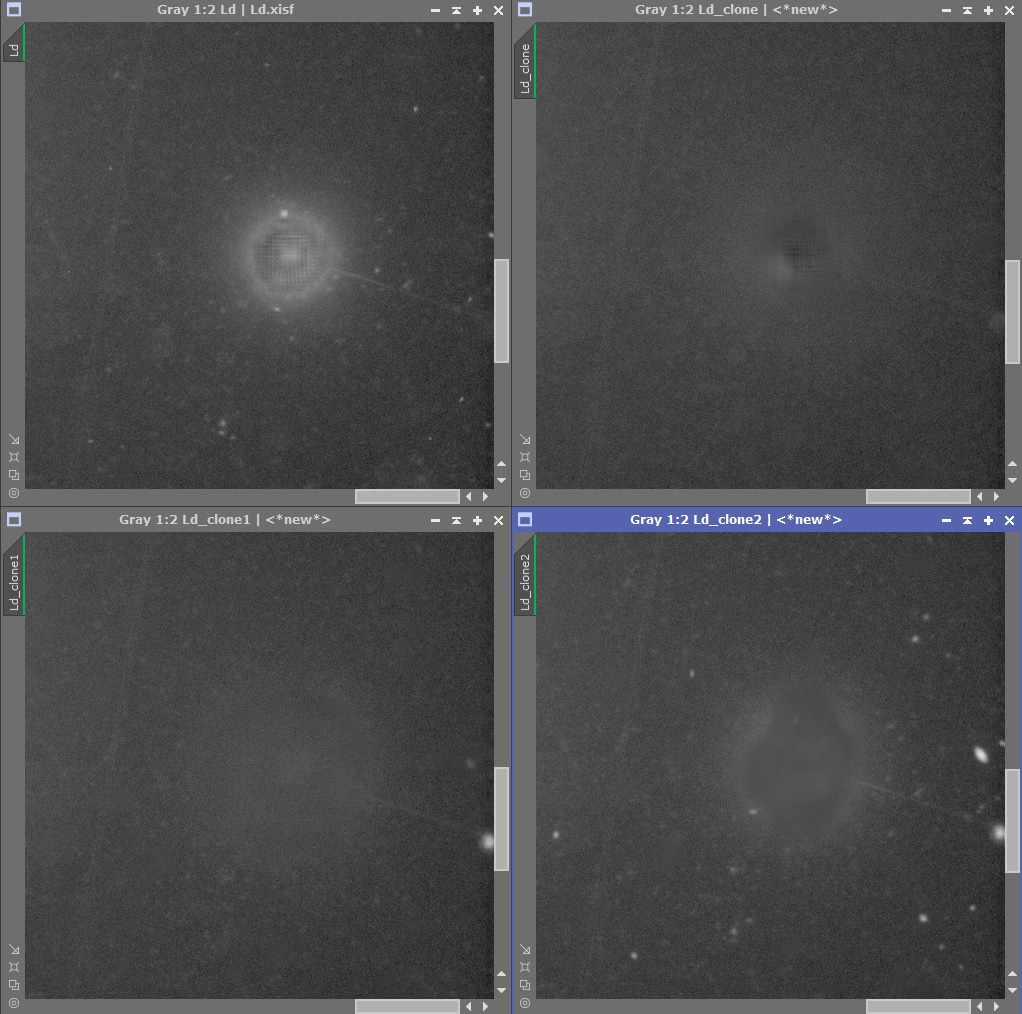
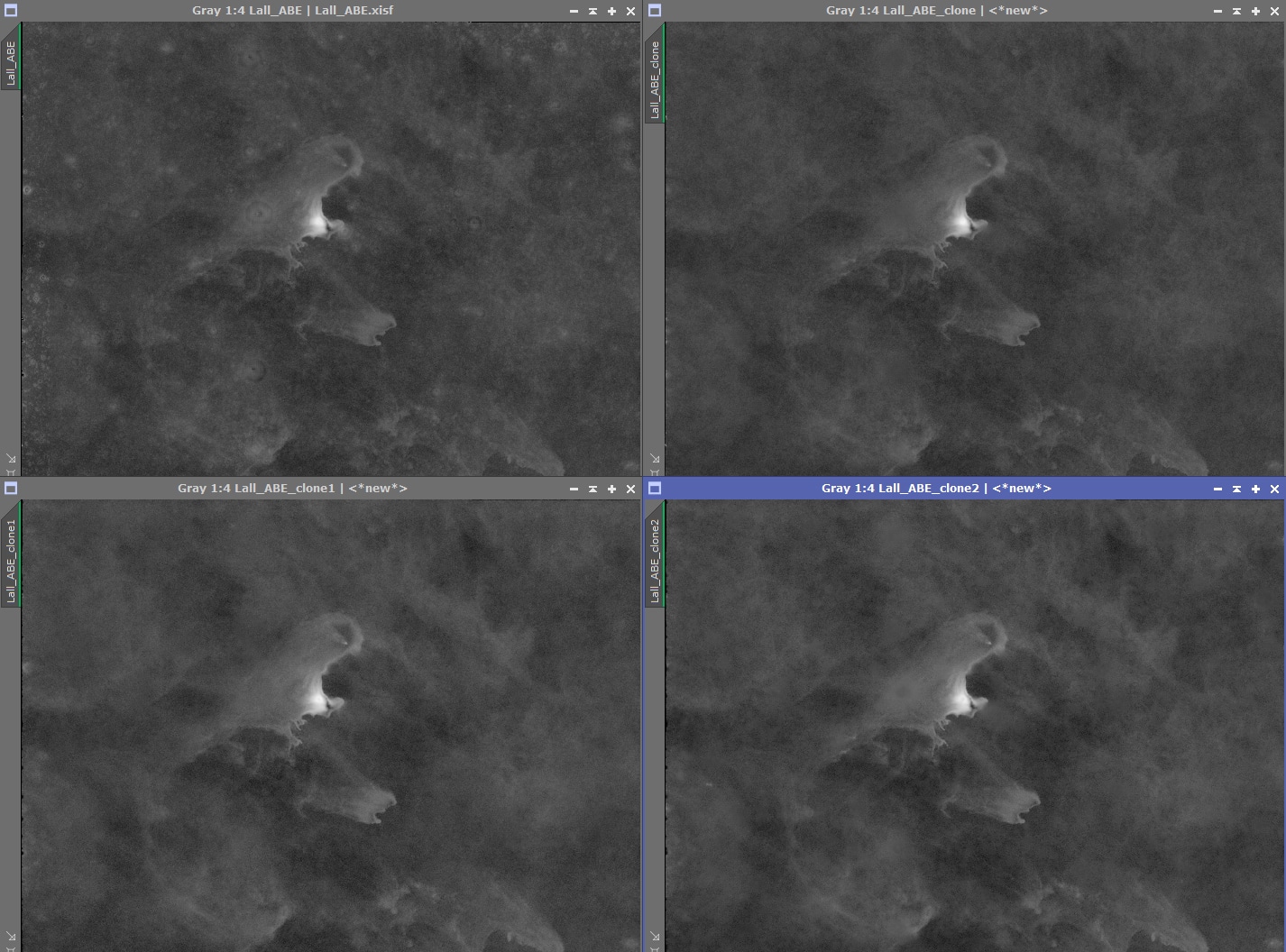
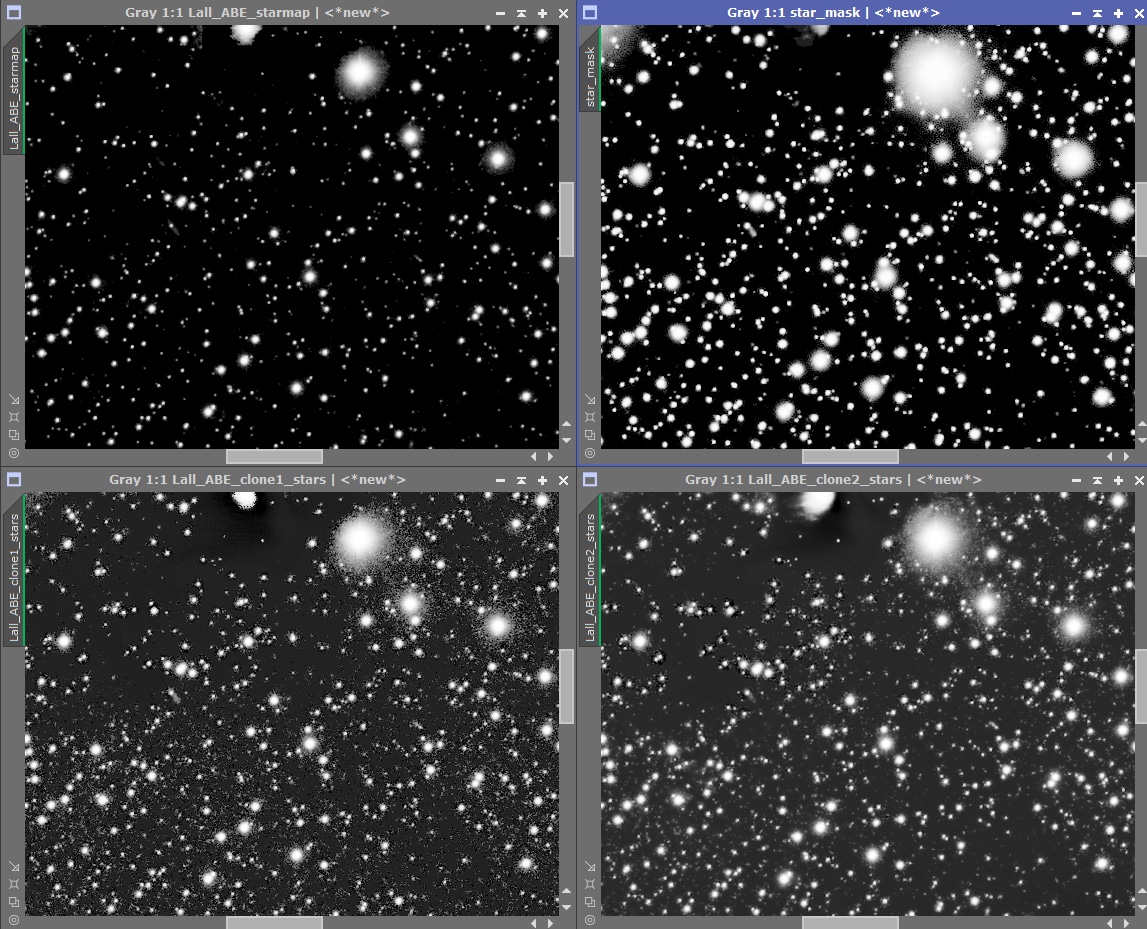
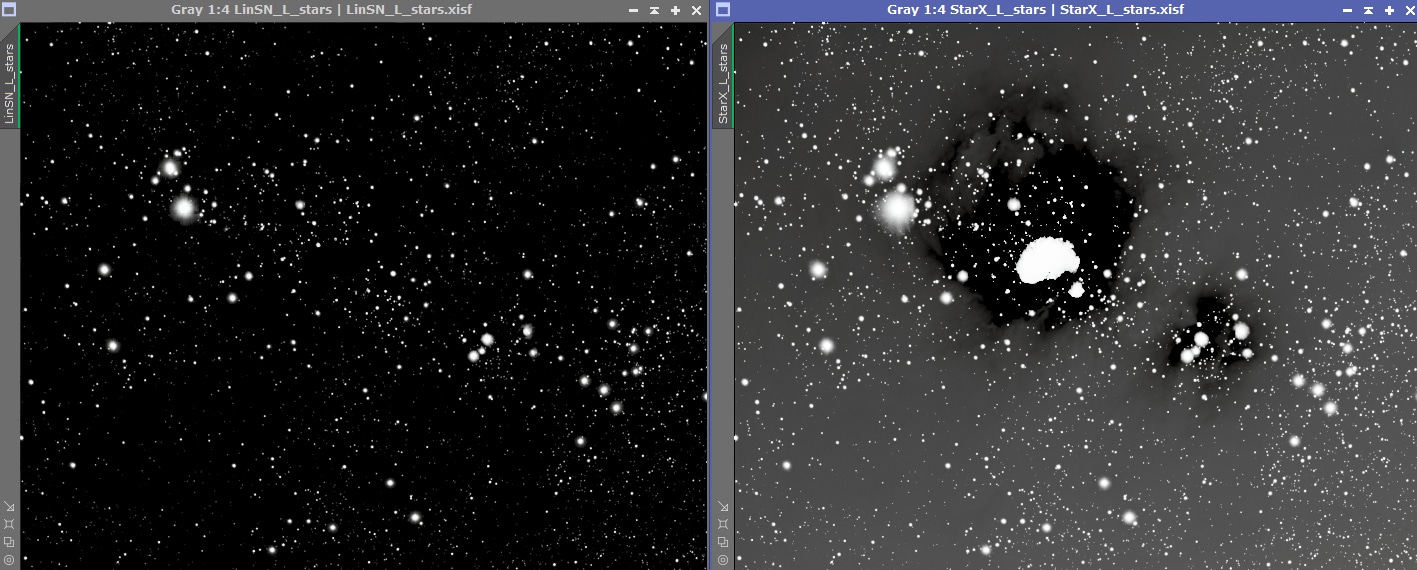
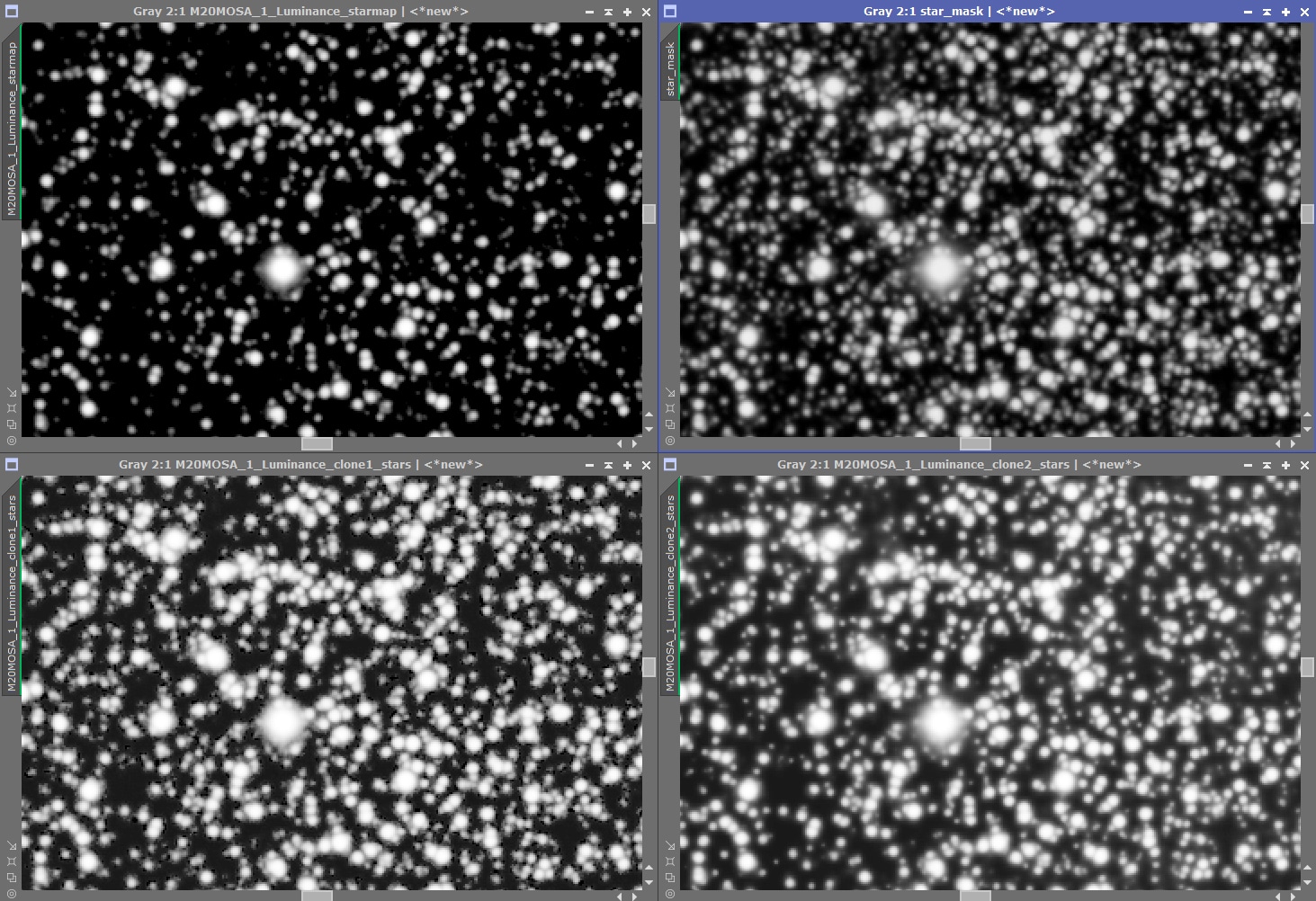
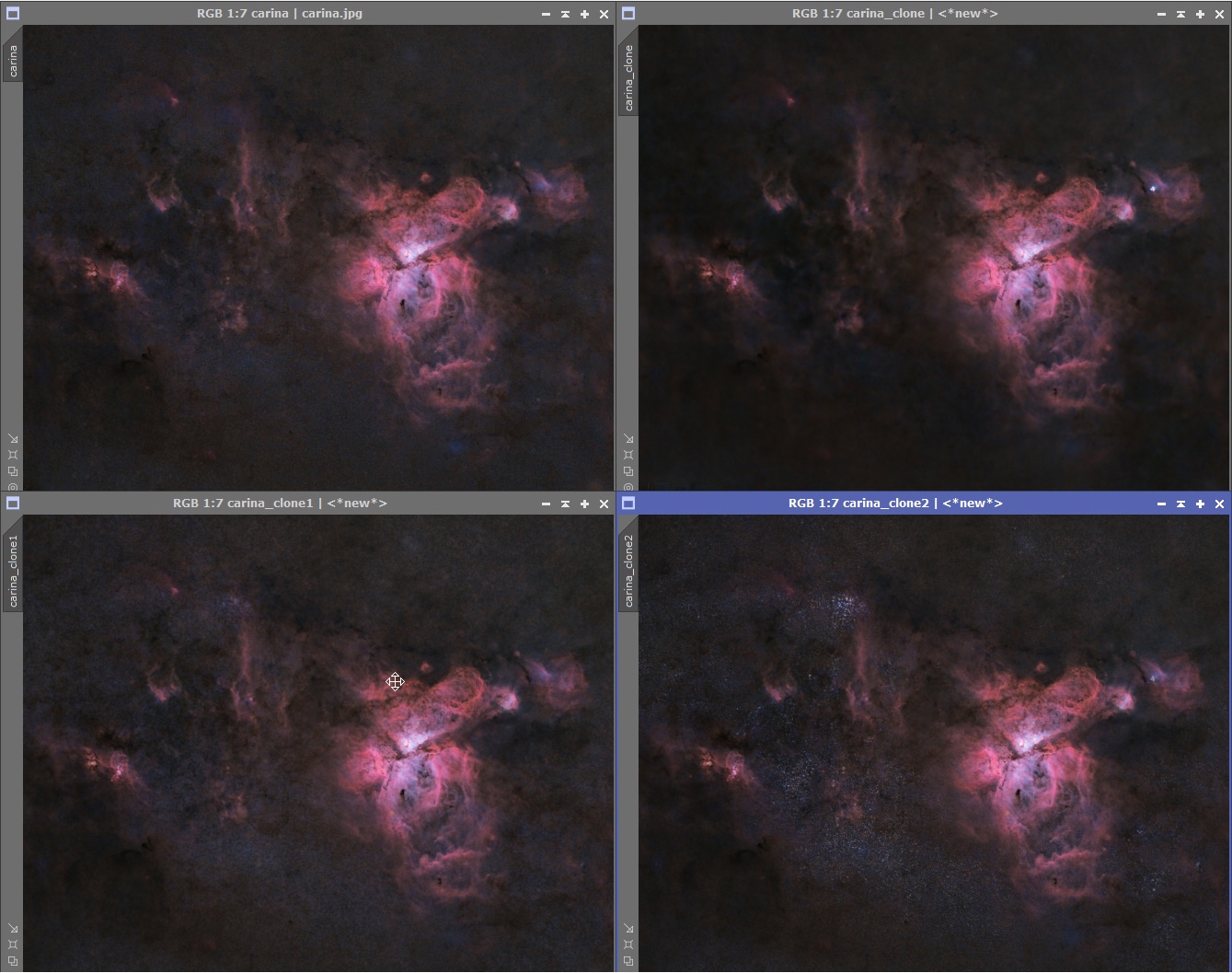
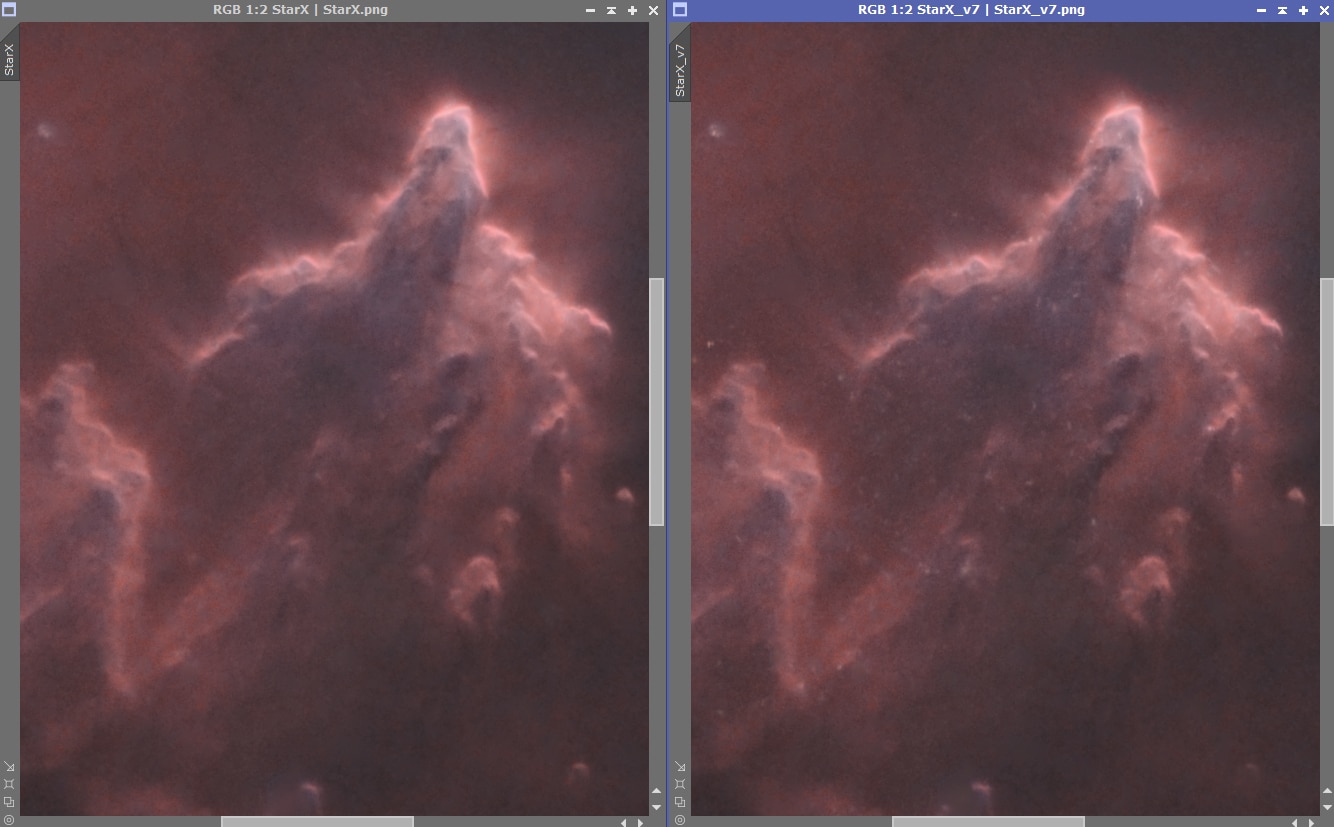
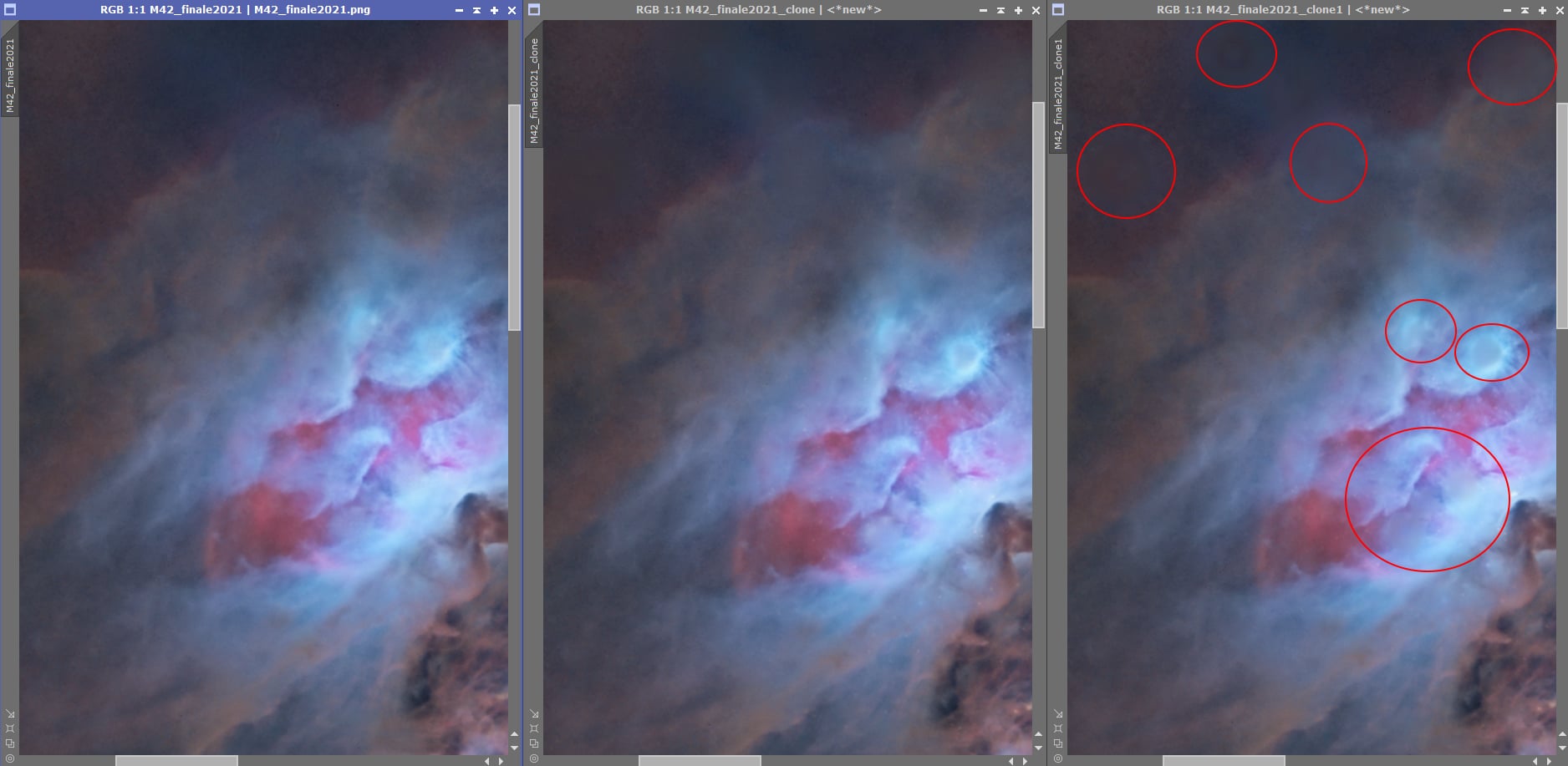
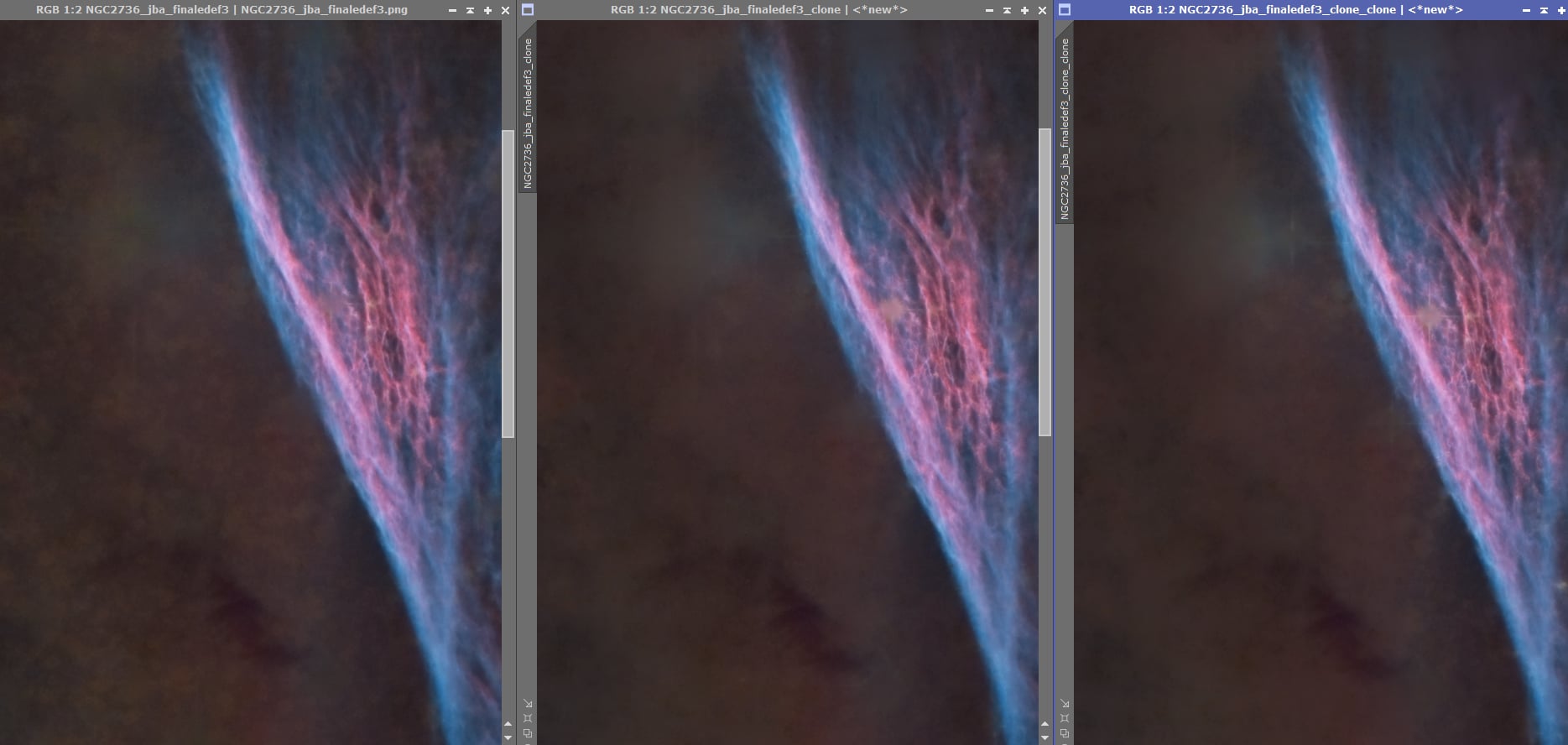
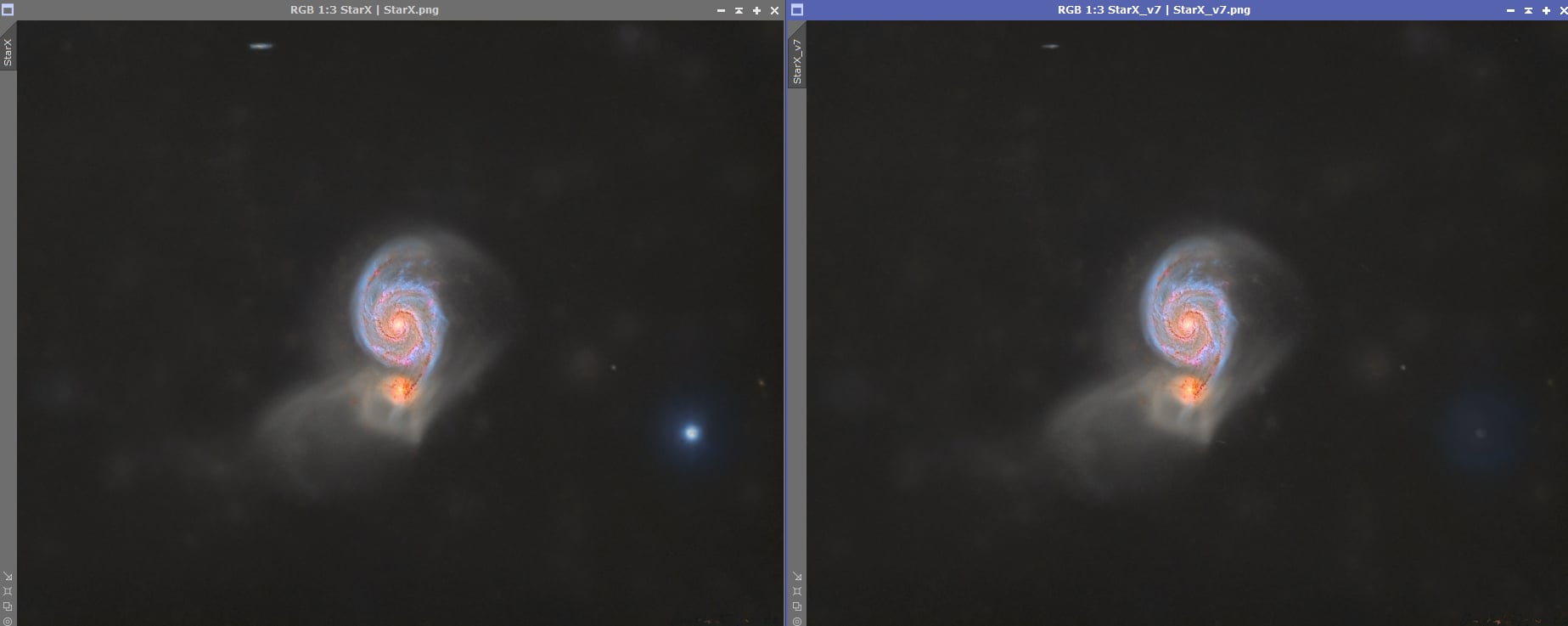
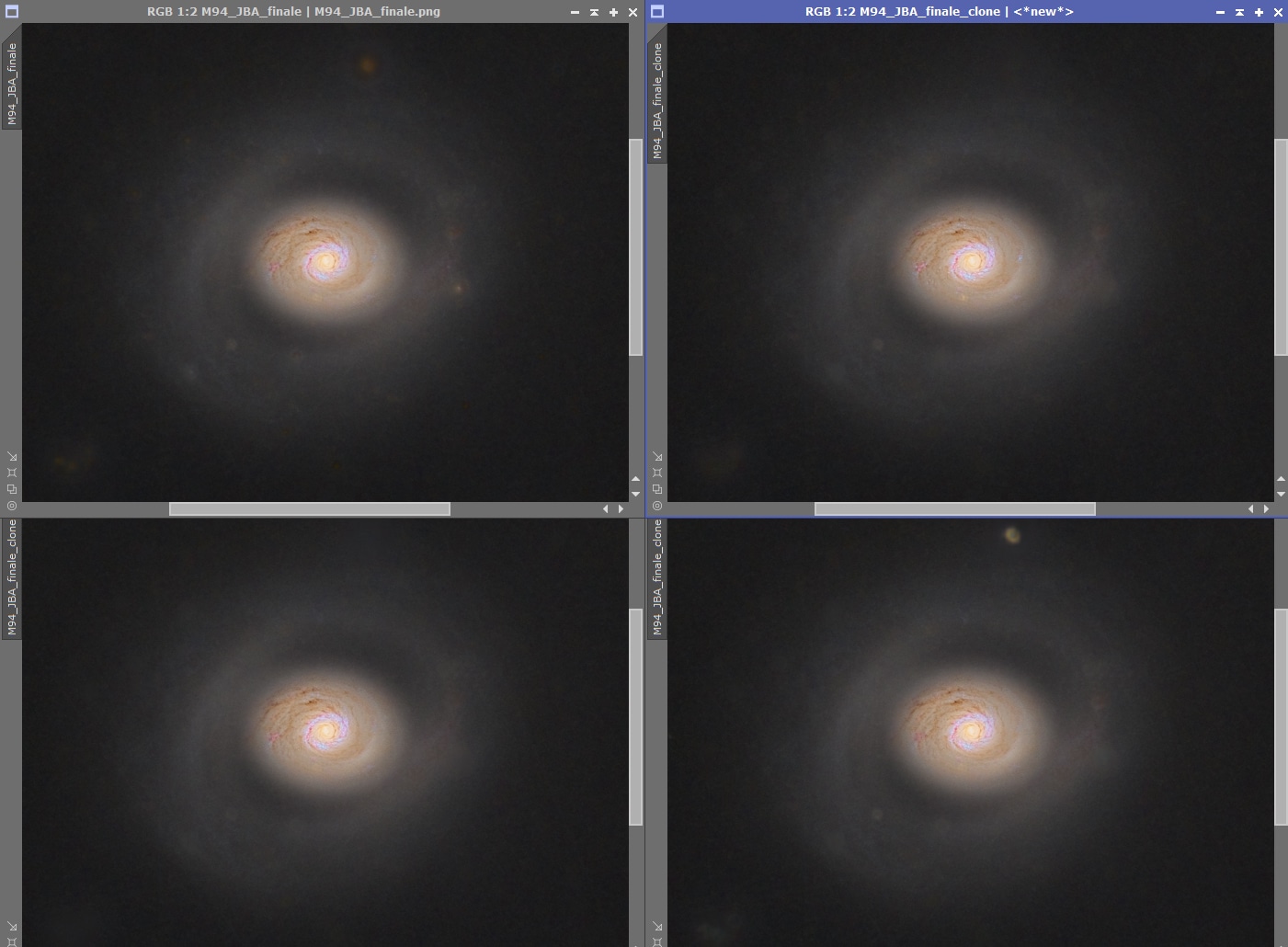
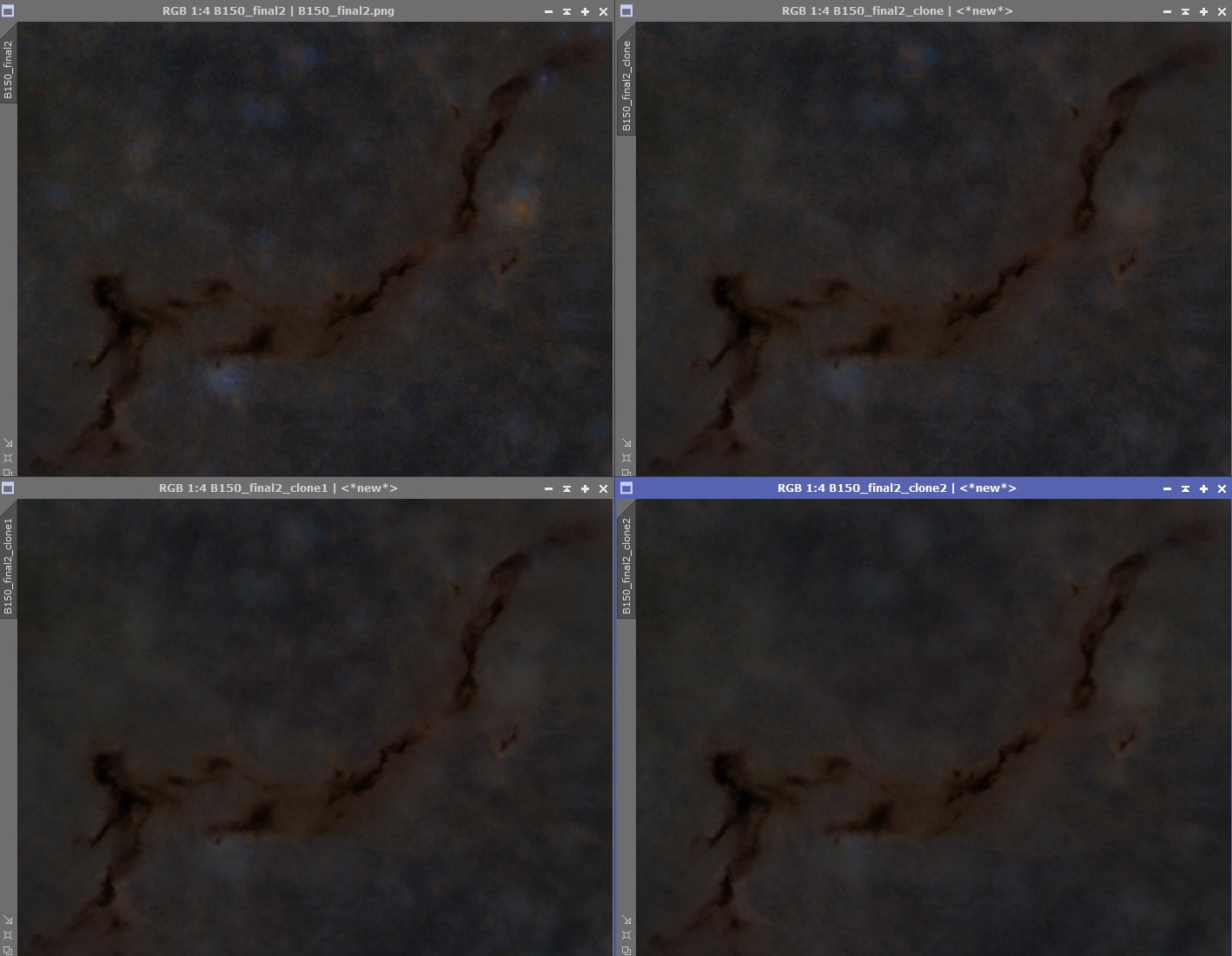
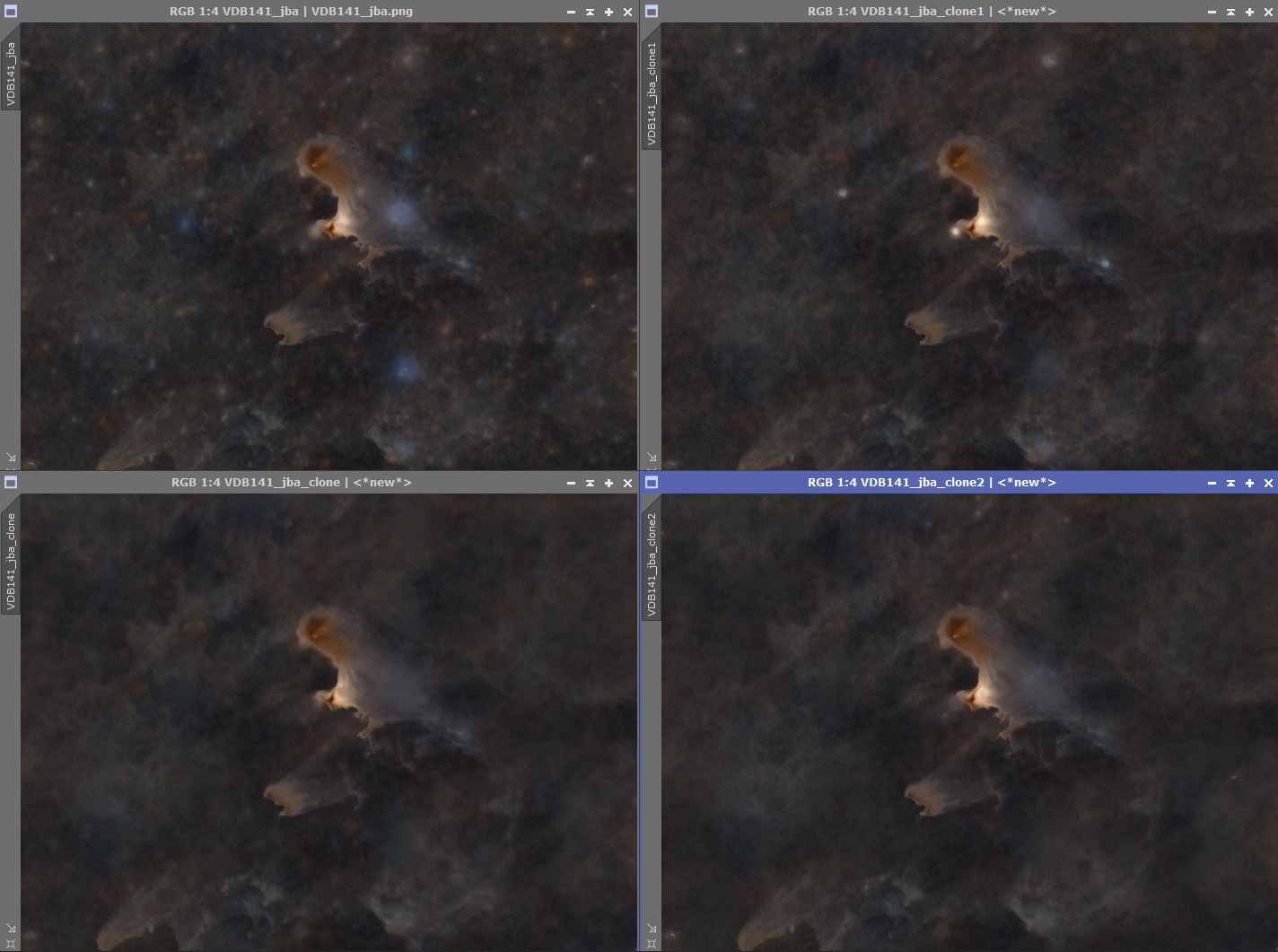
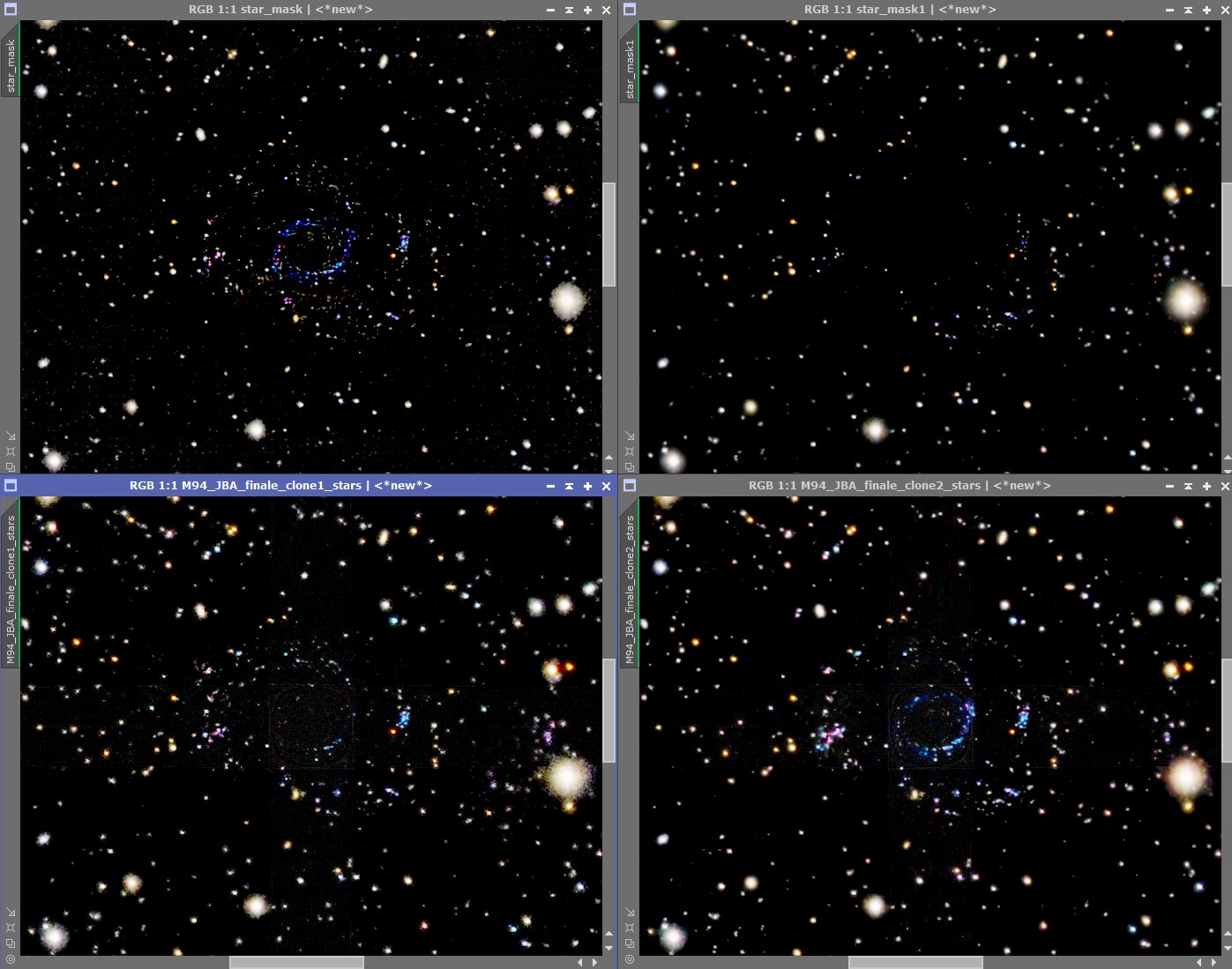
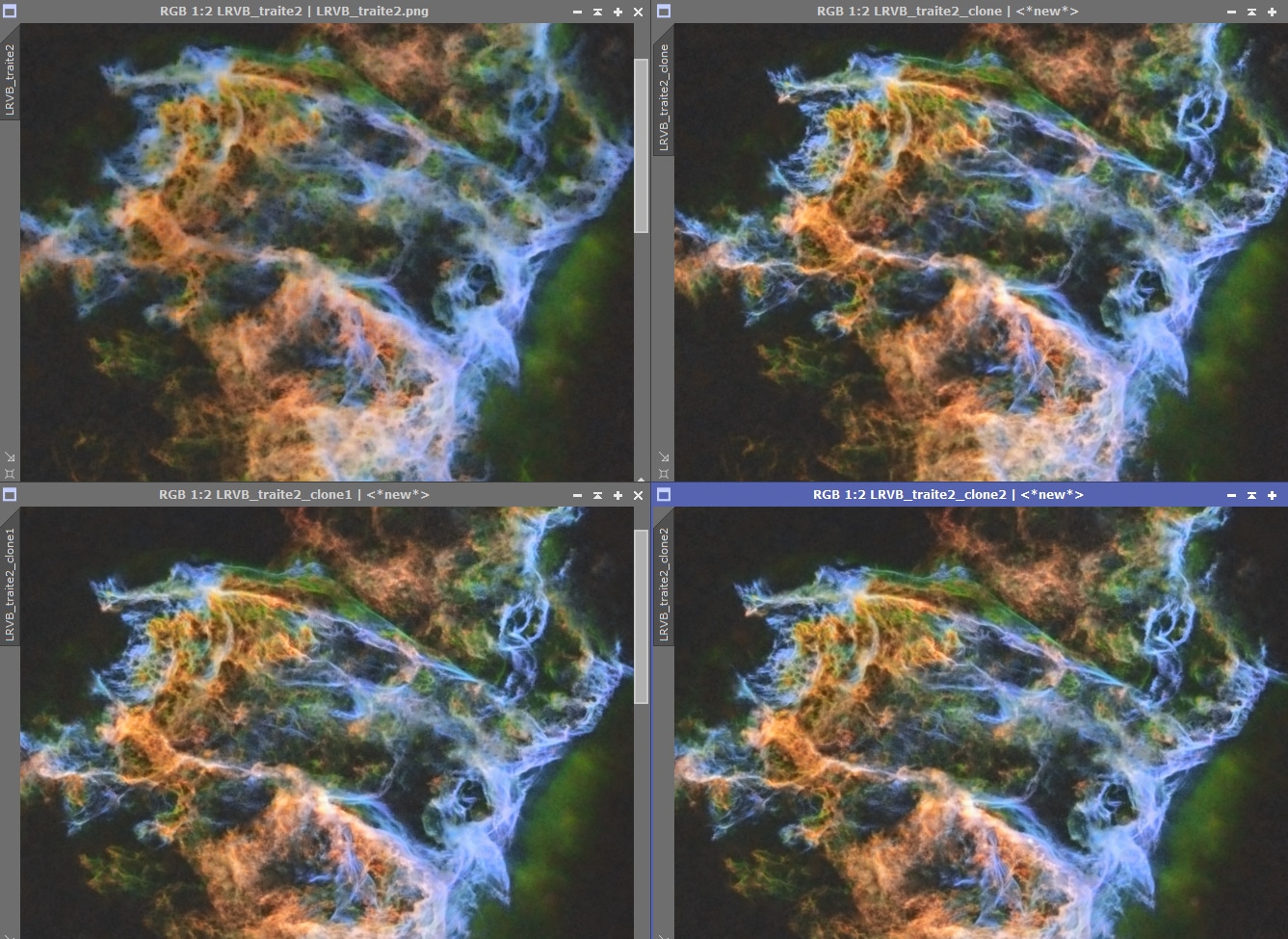
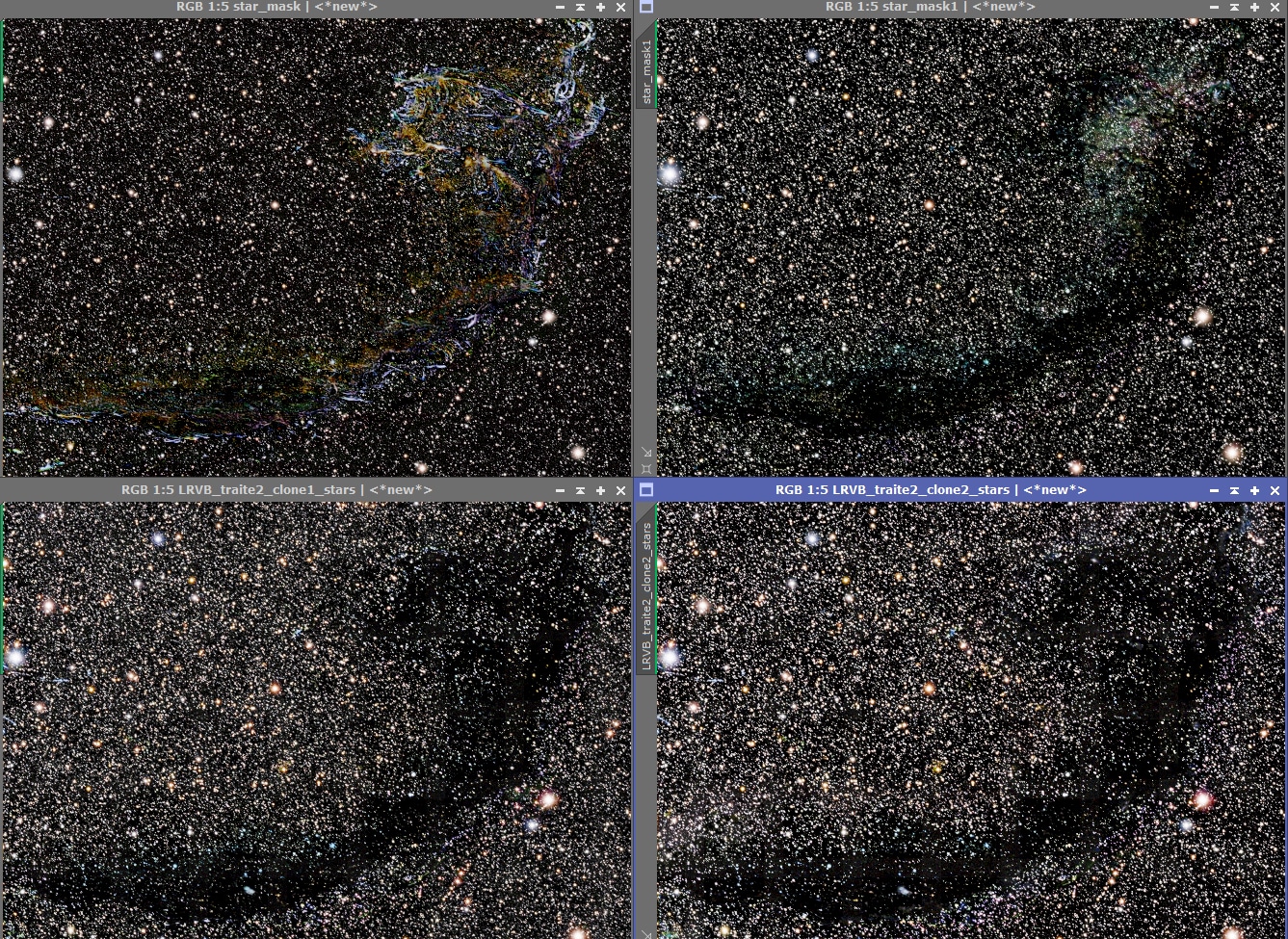
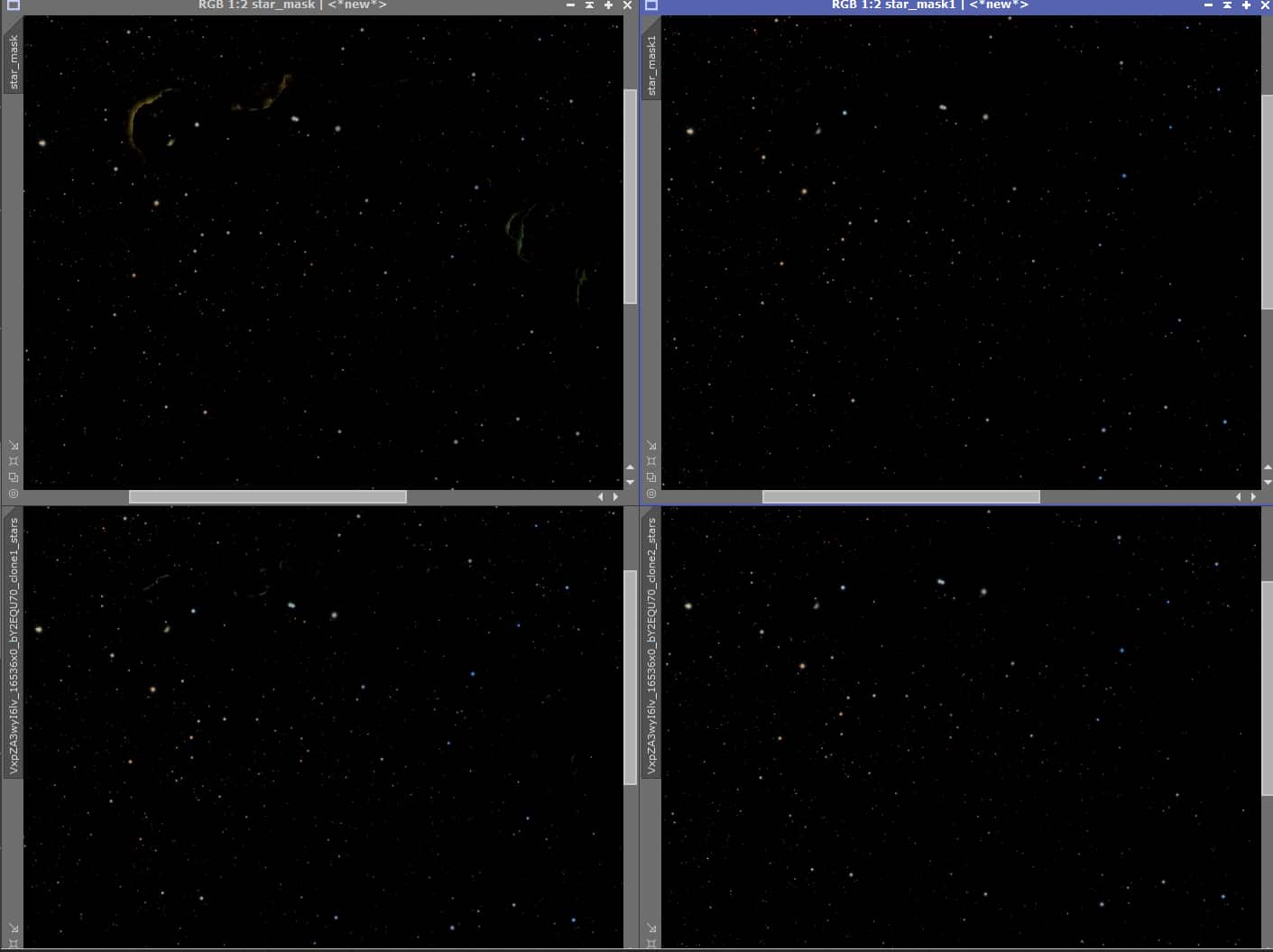
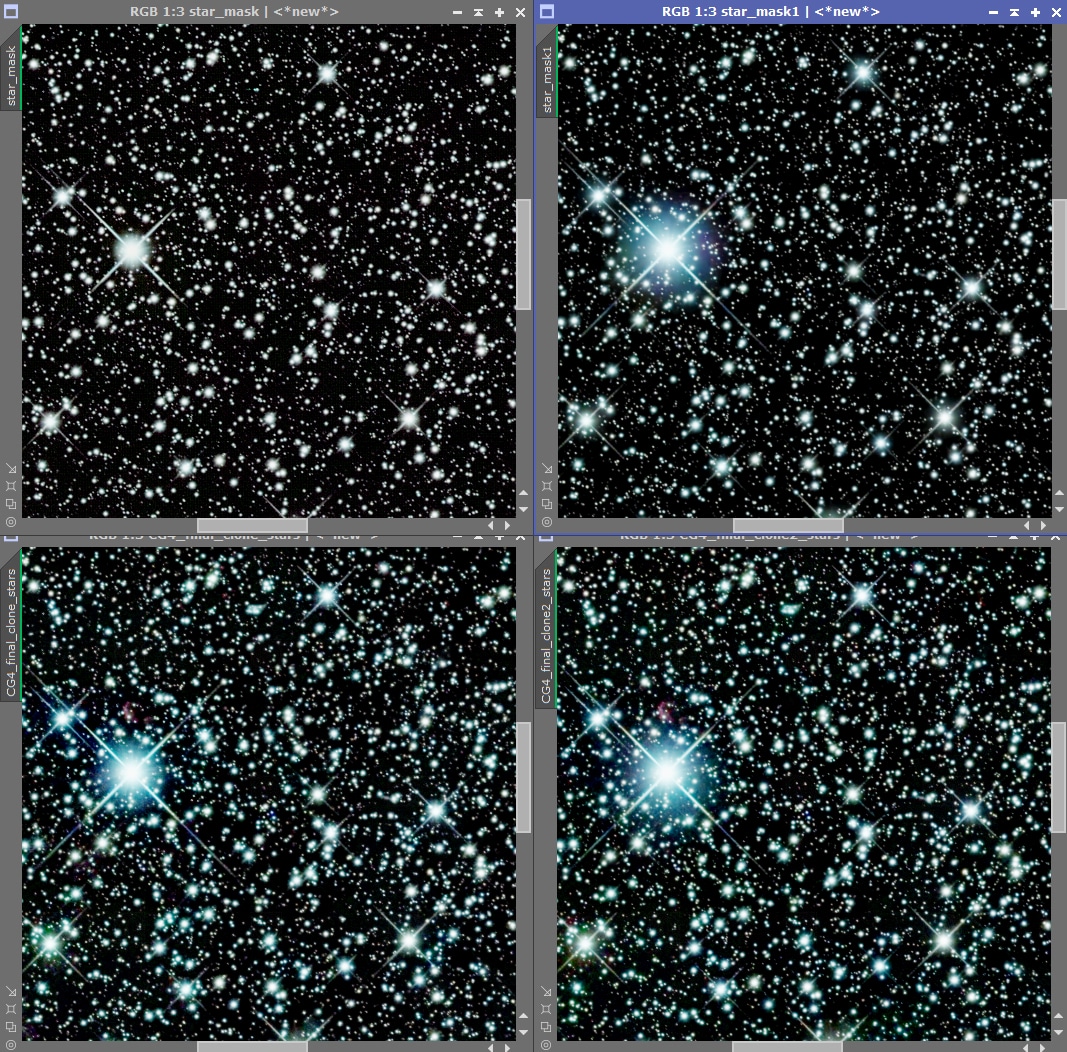
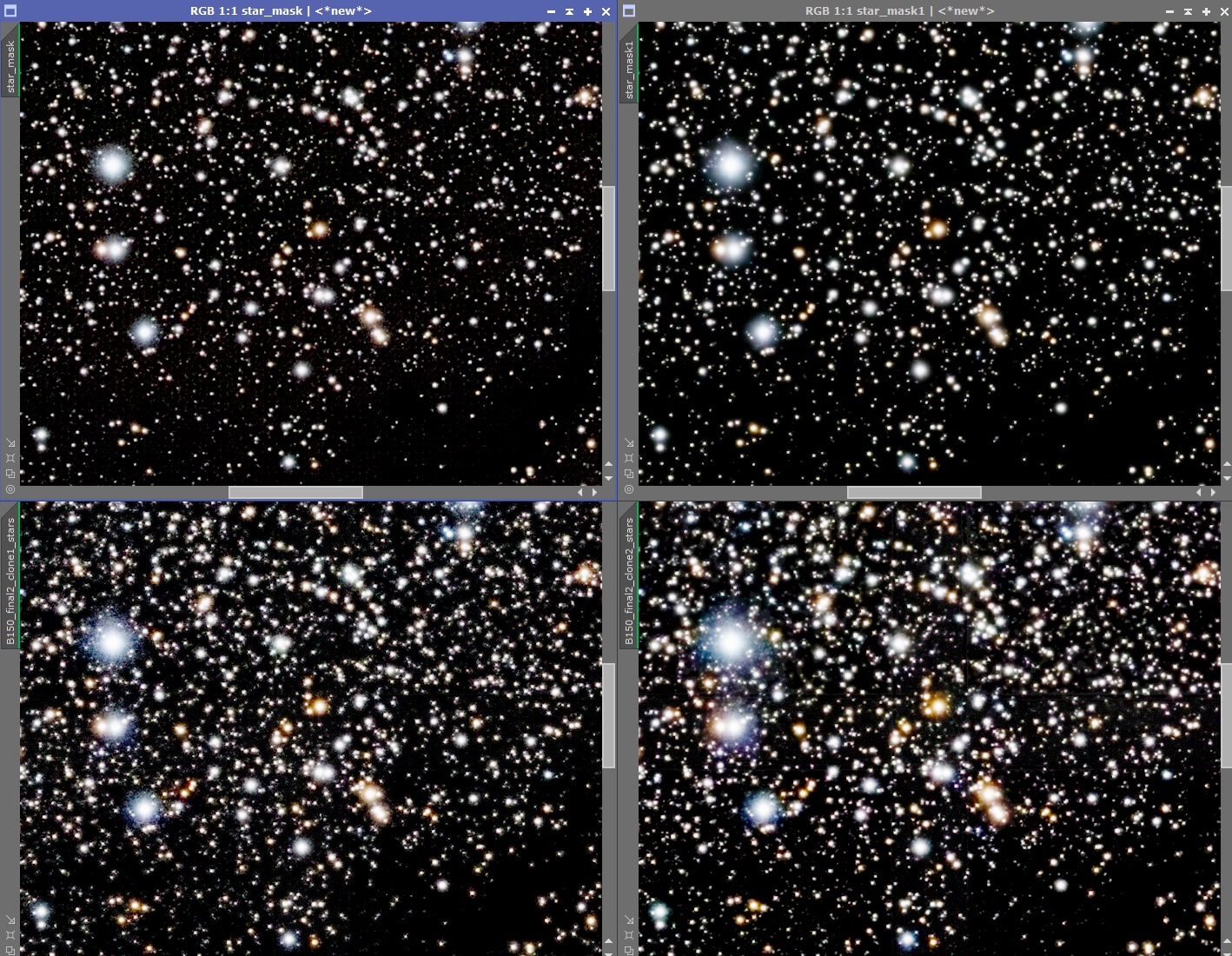
Starnet v2 vs Star-X Terminator v10 : le match-retour !
Le « match-retour » entre les deux dernières versions des logiciels « stars » du starless : StarNet v2 face au challenger Star-X v10. Voici un grand test complet pour essayer de les départager !

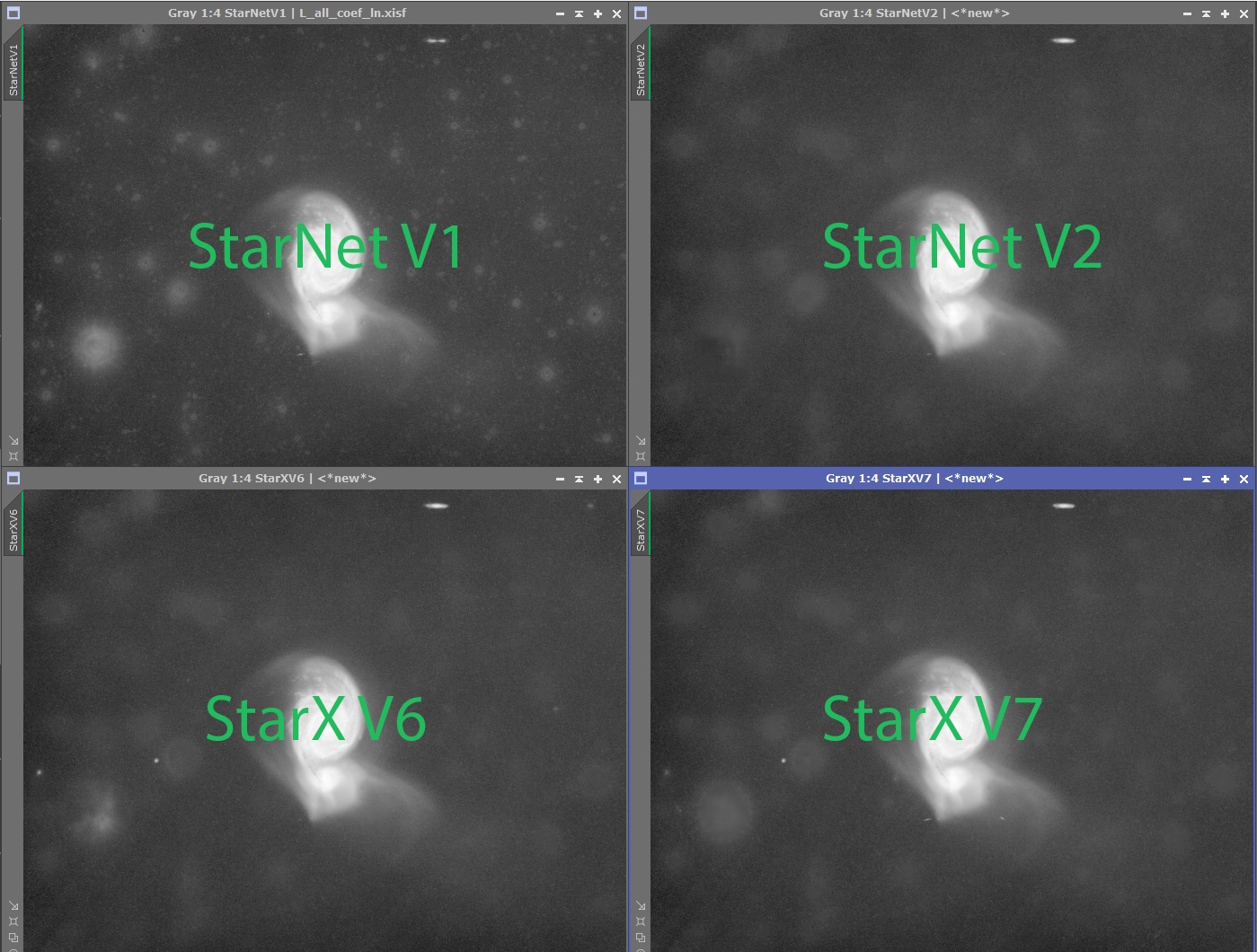
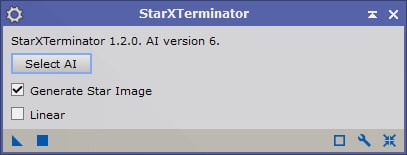
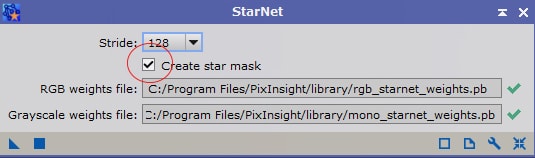
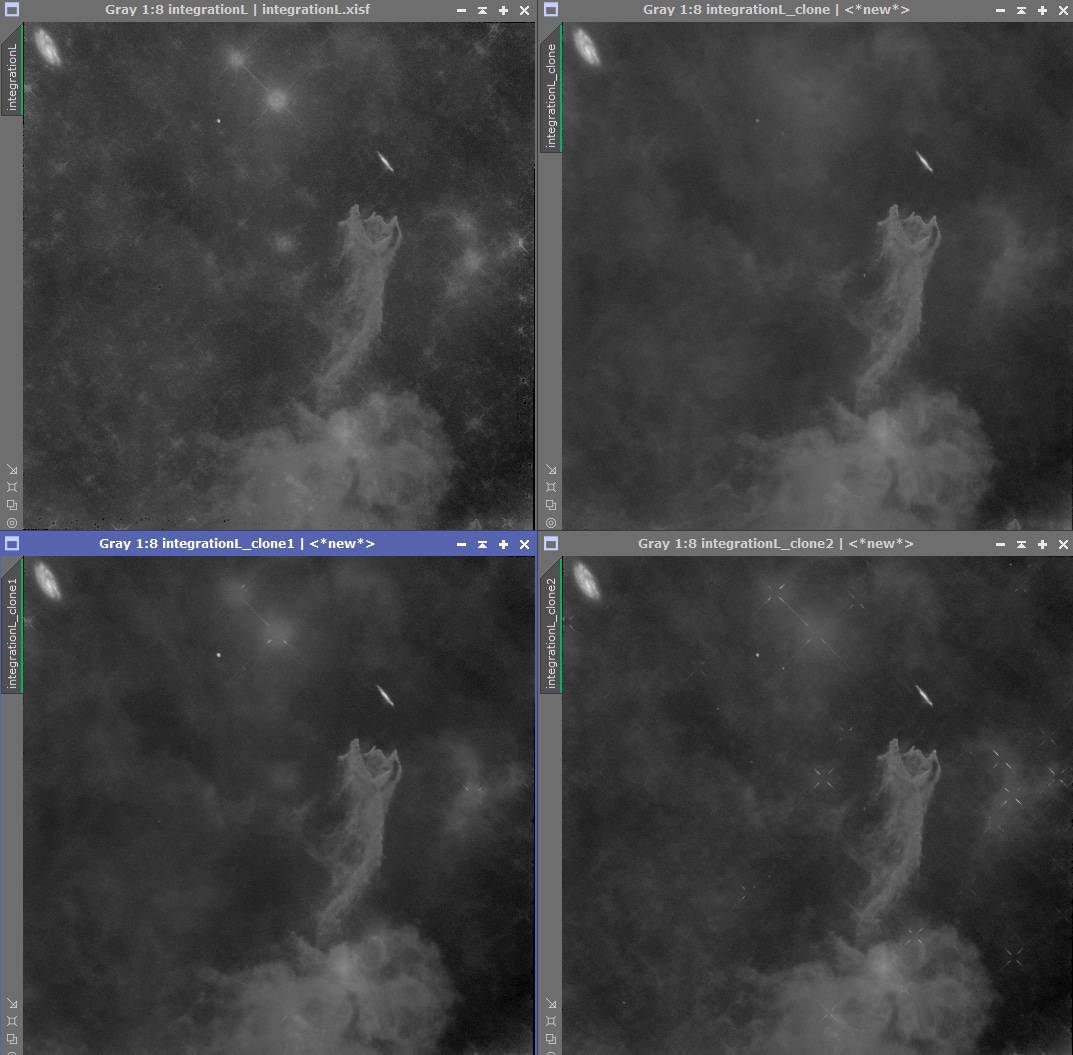
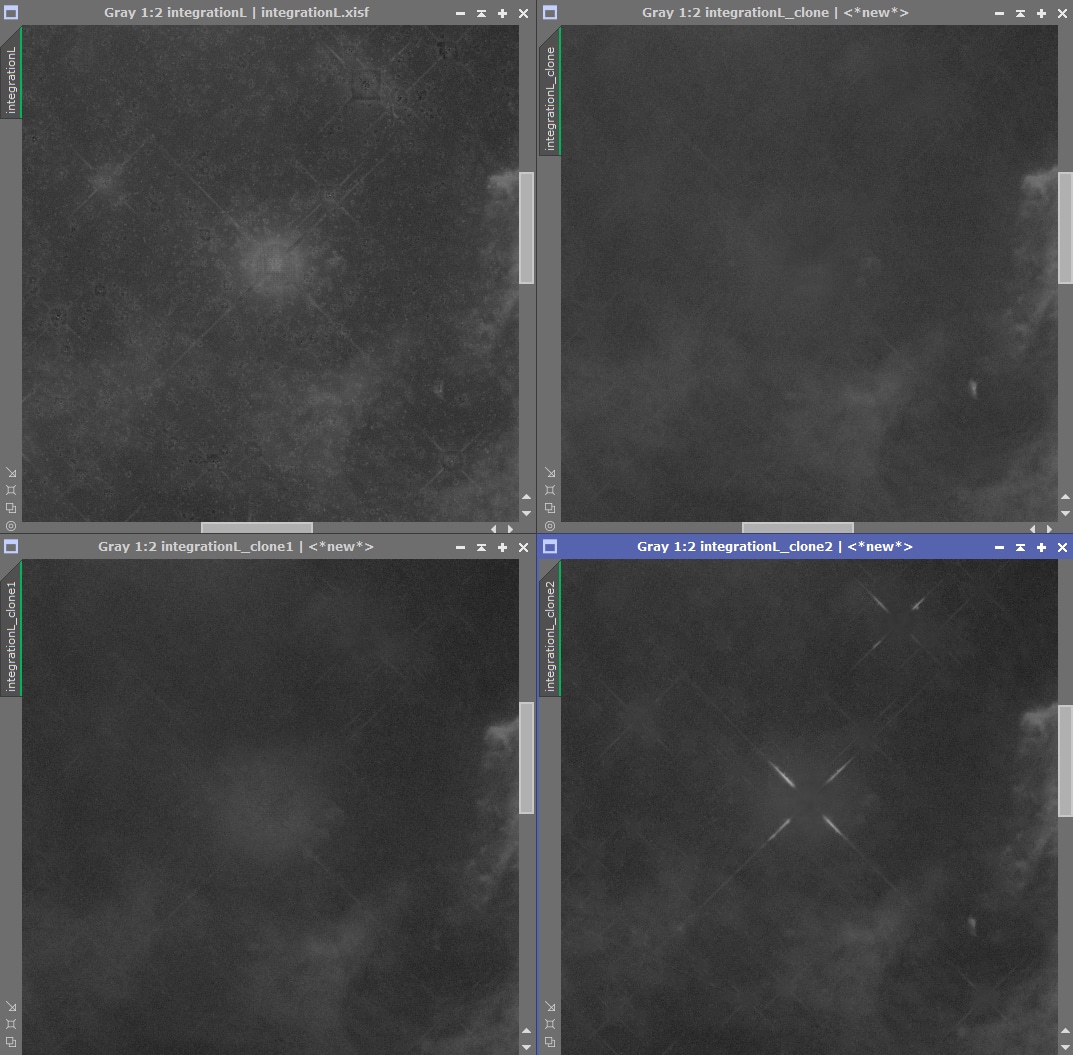
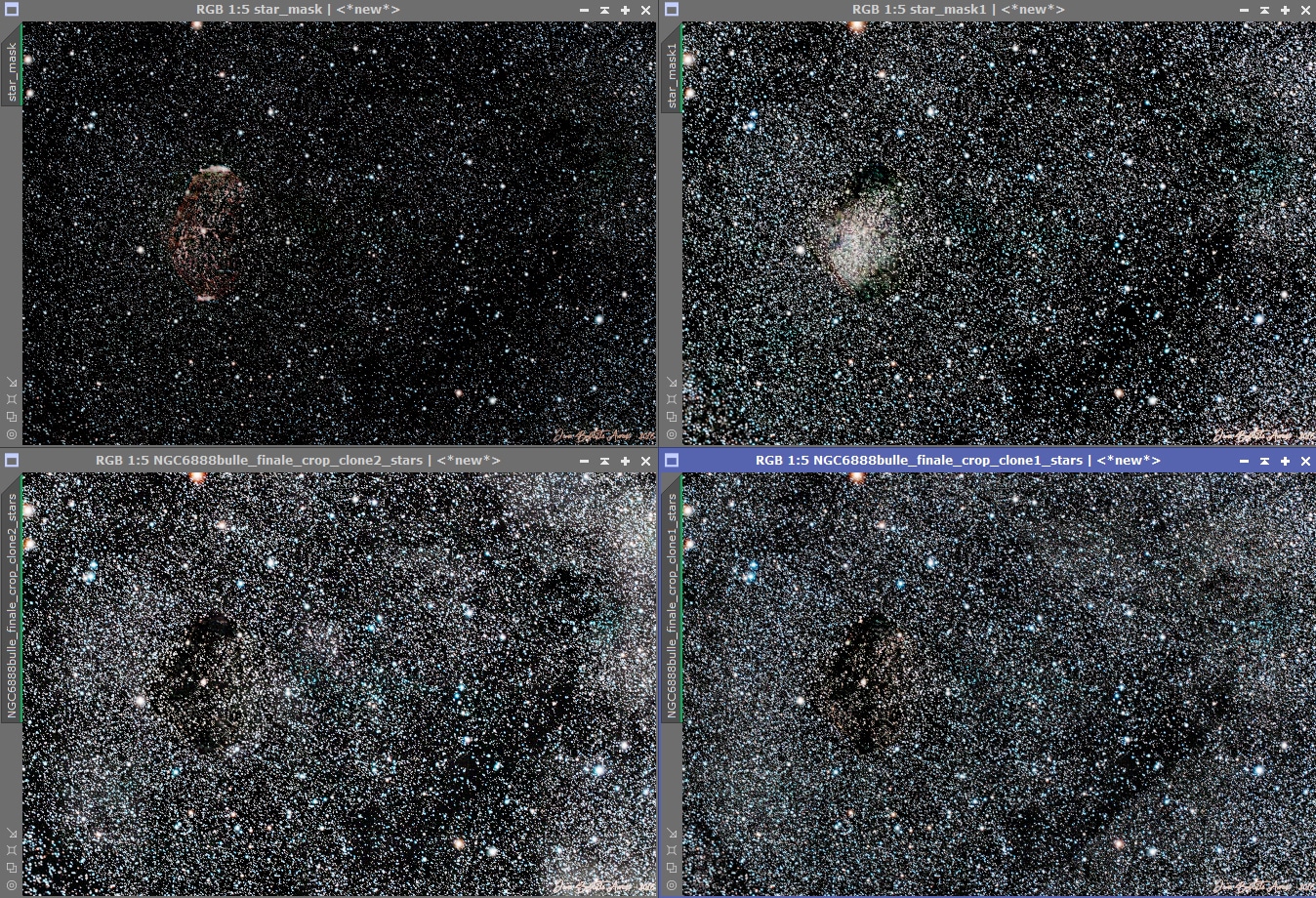
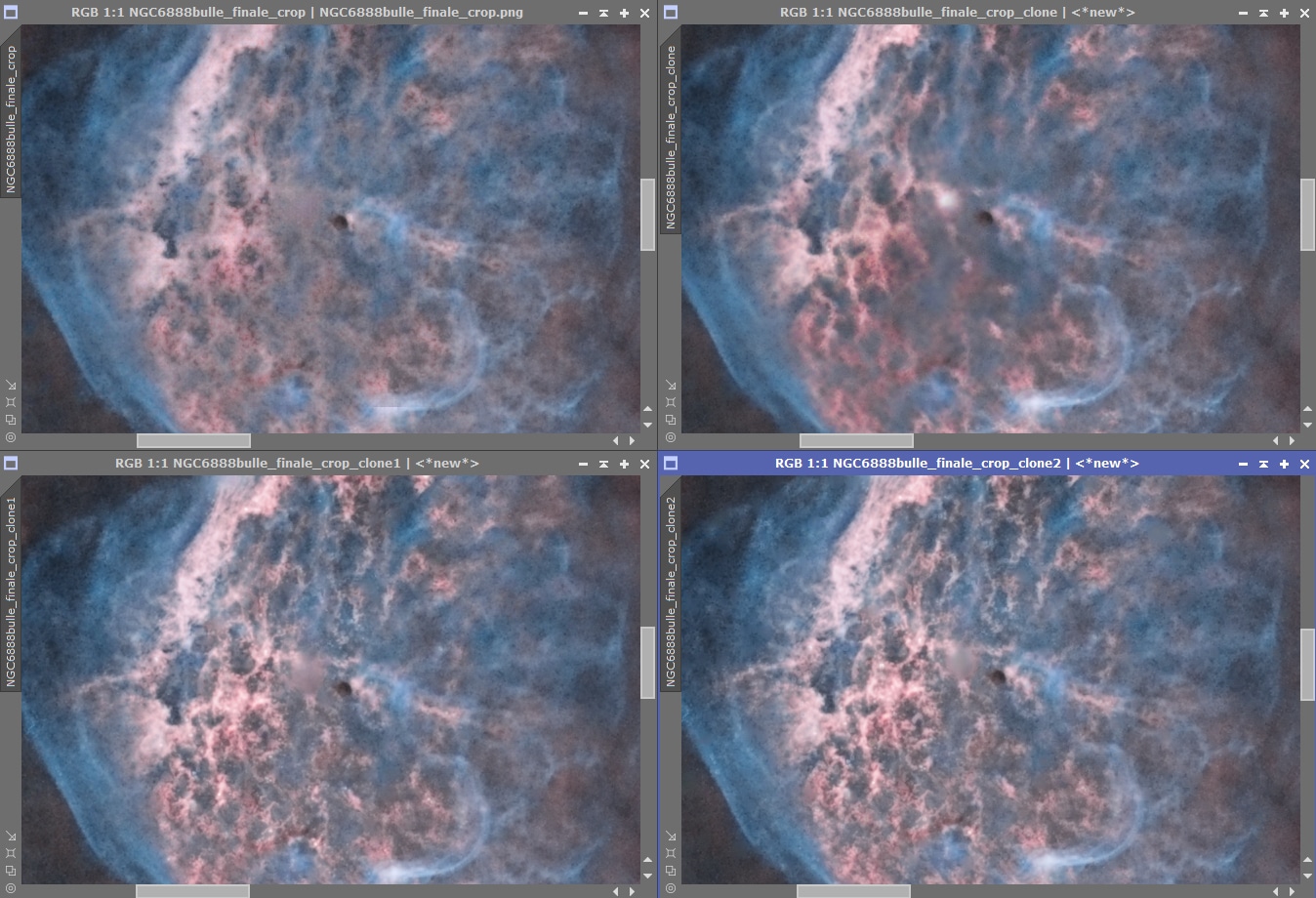
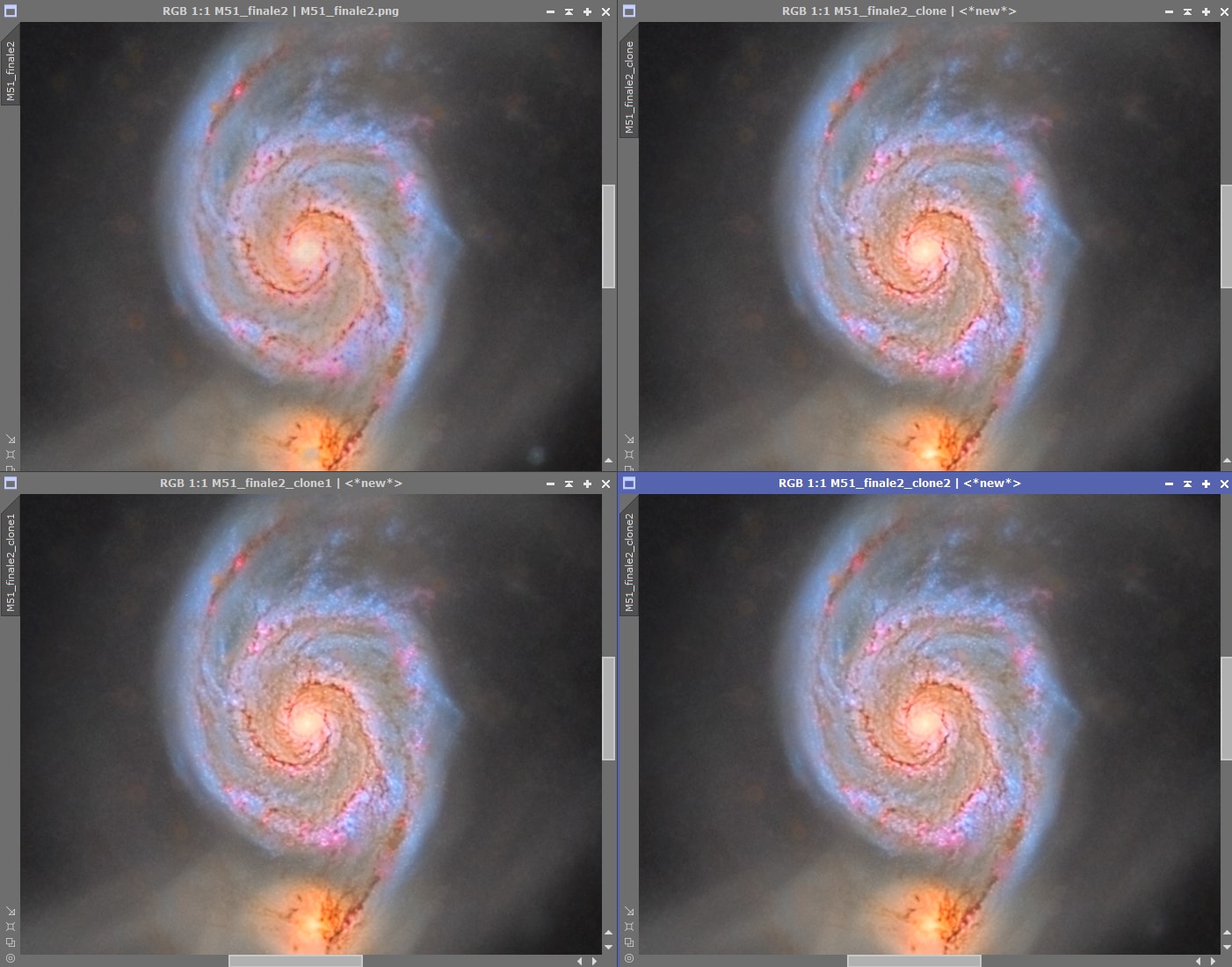
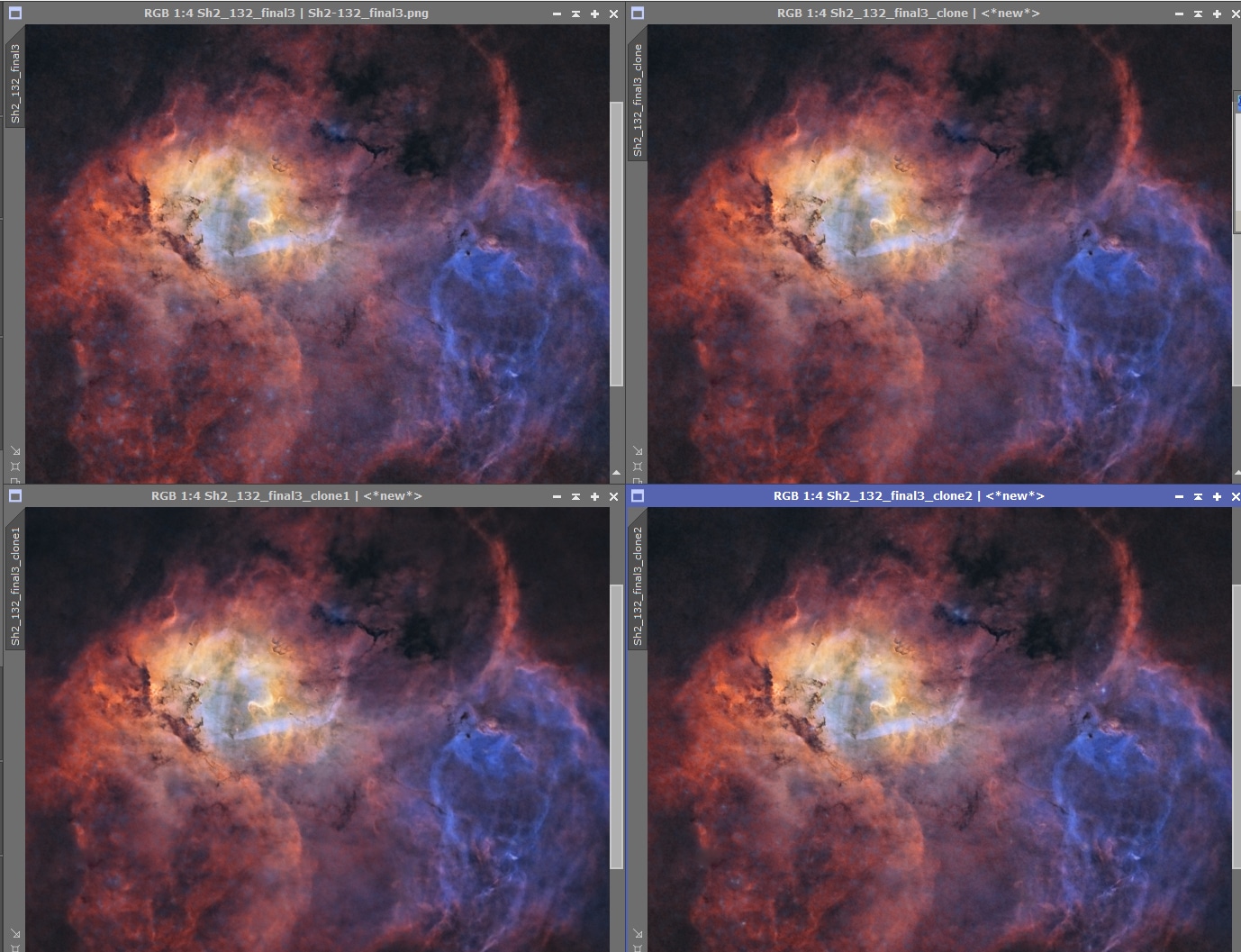
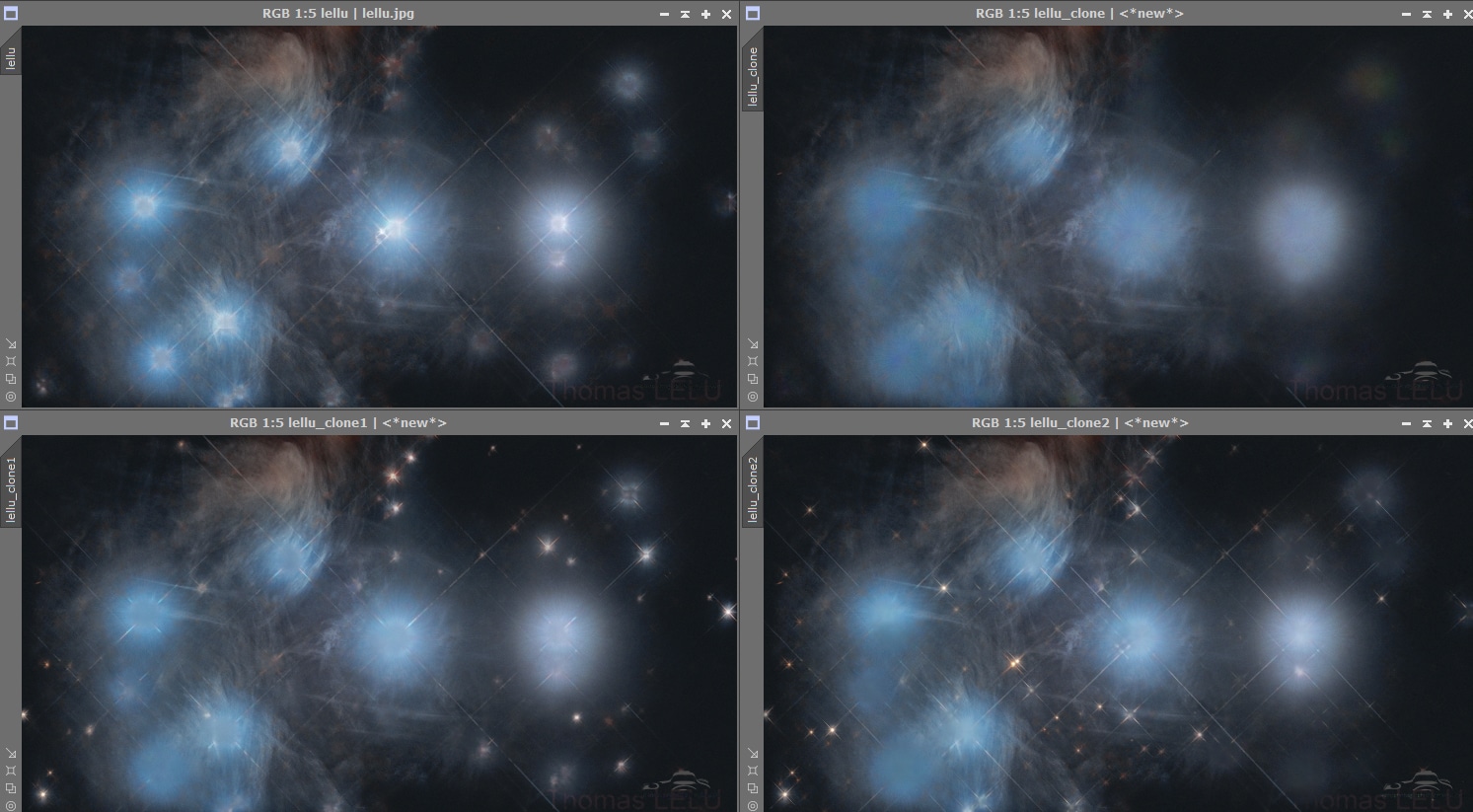
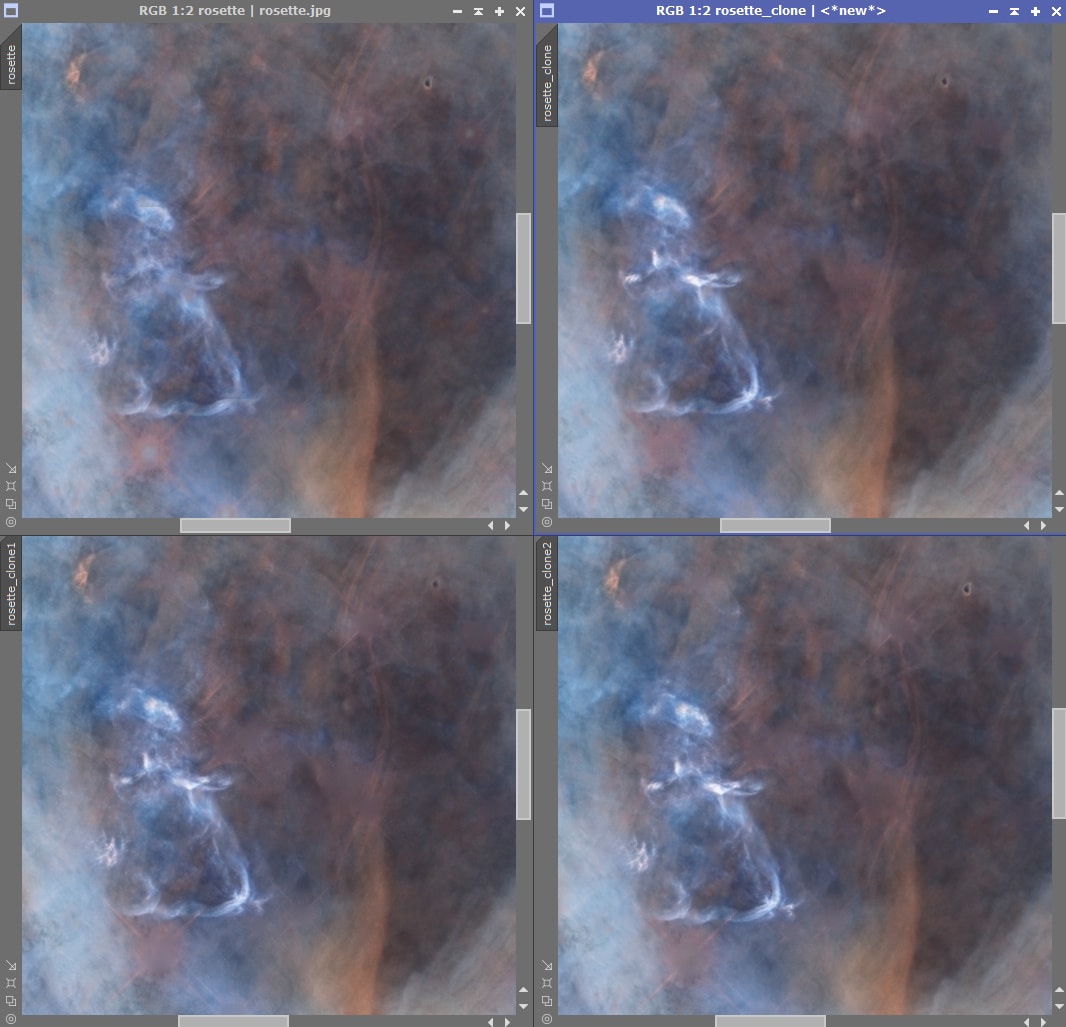
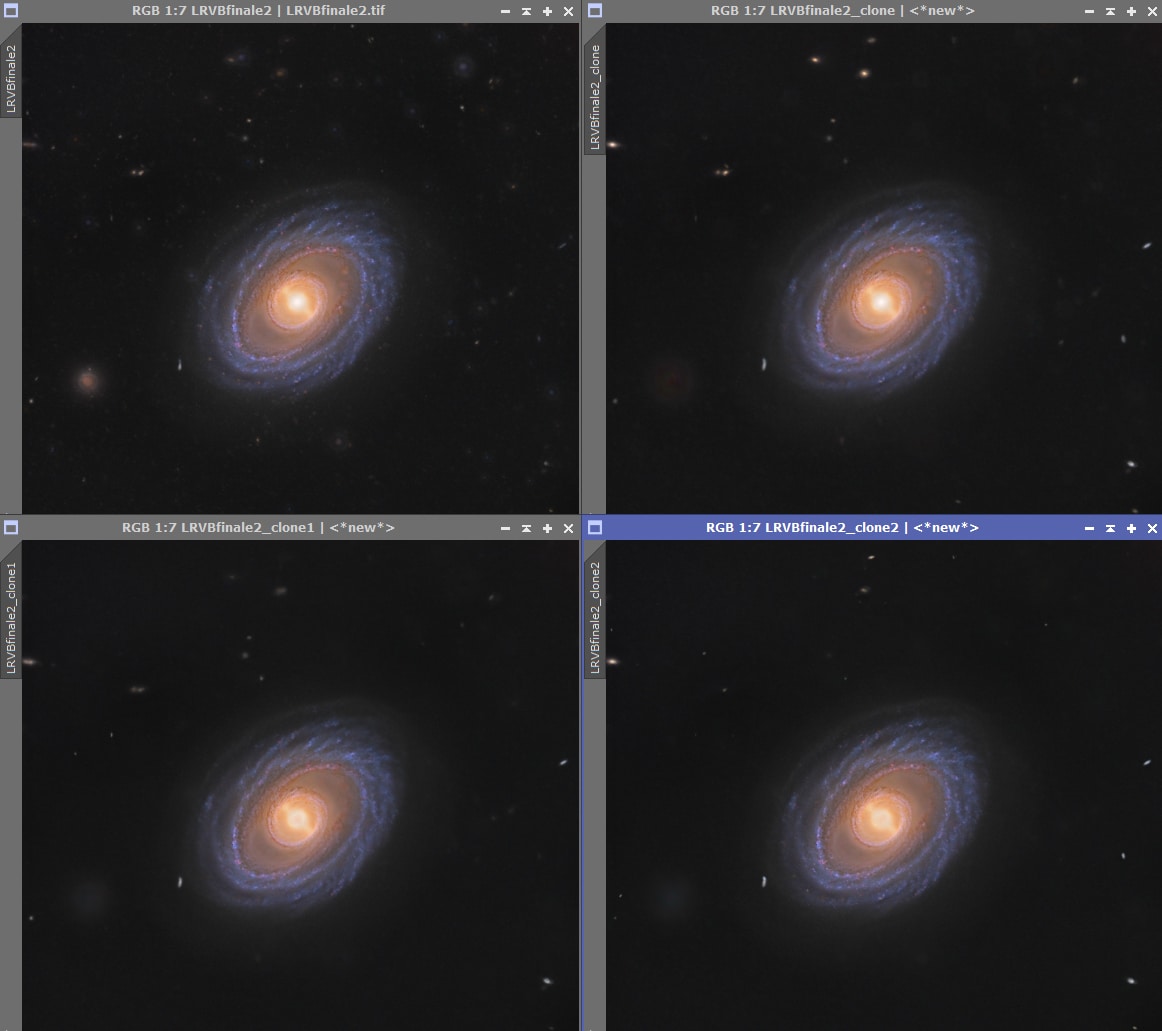
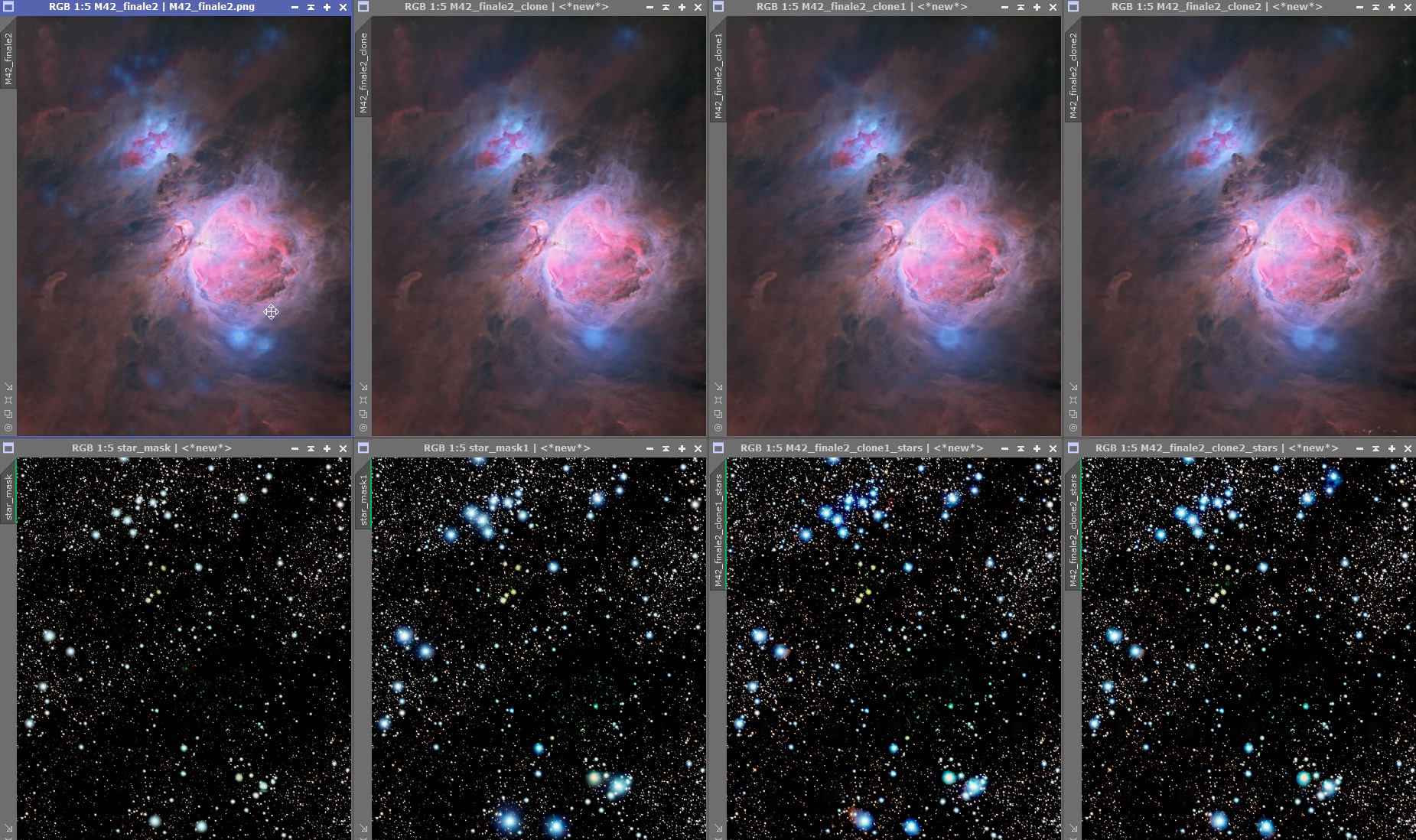
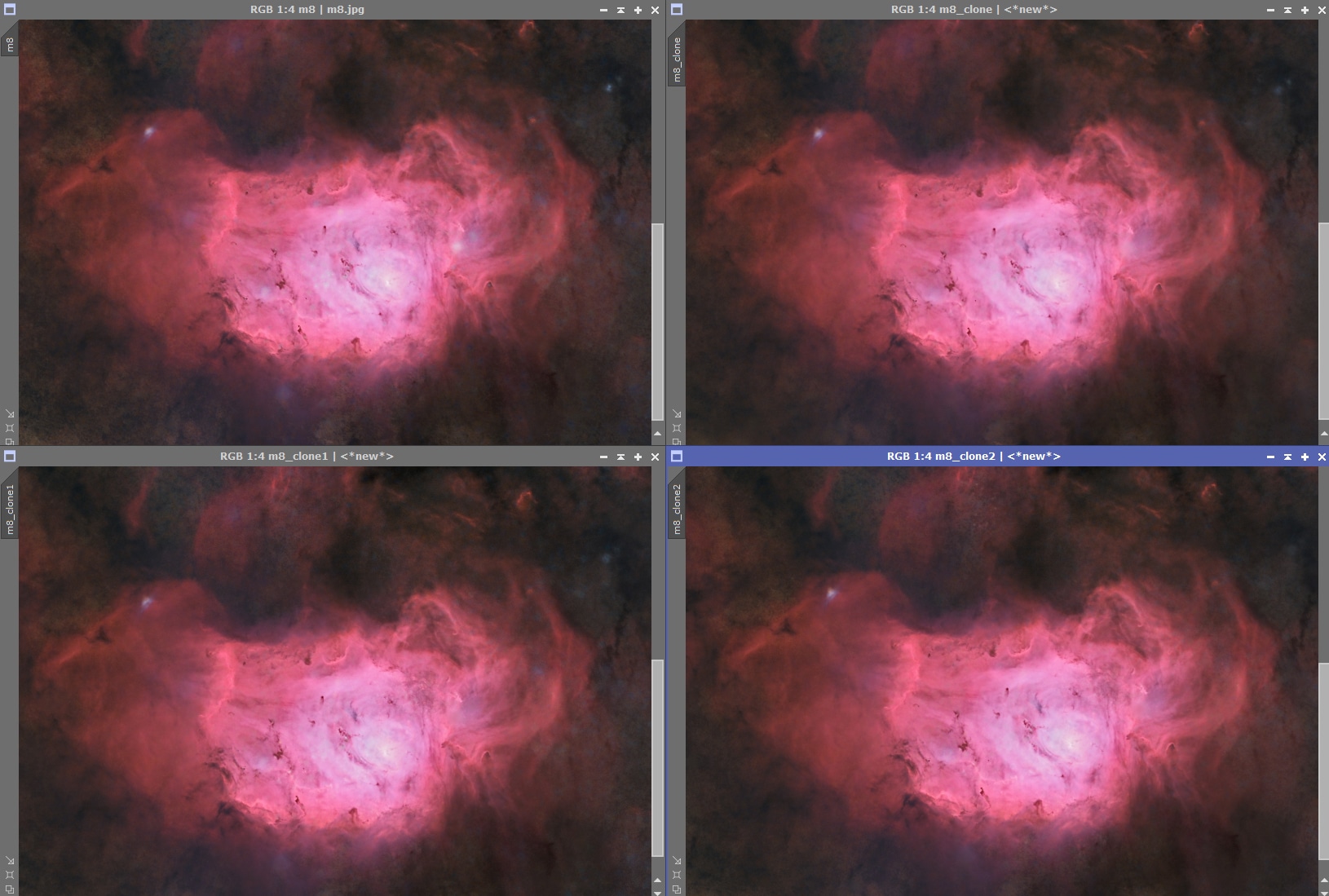
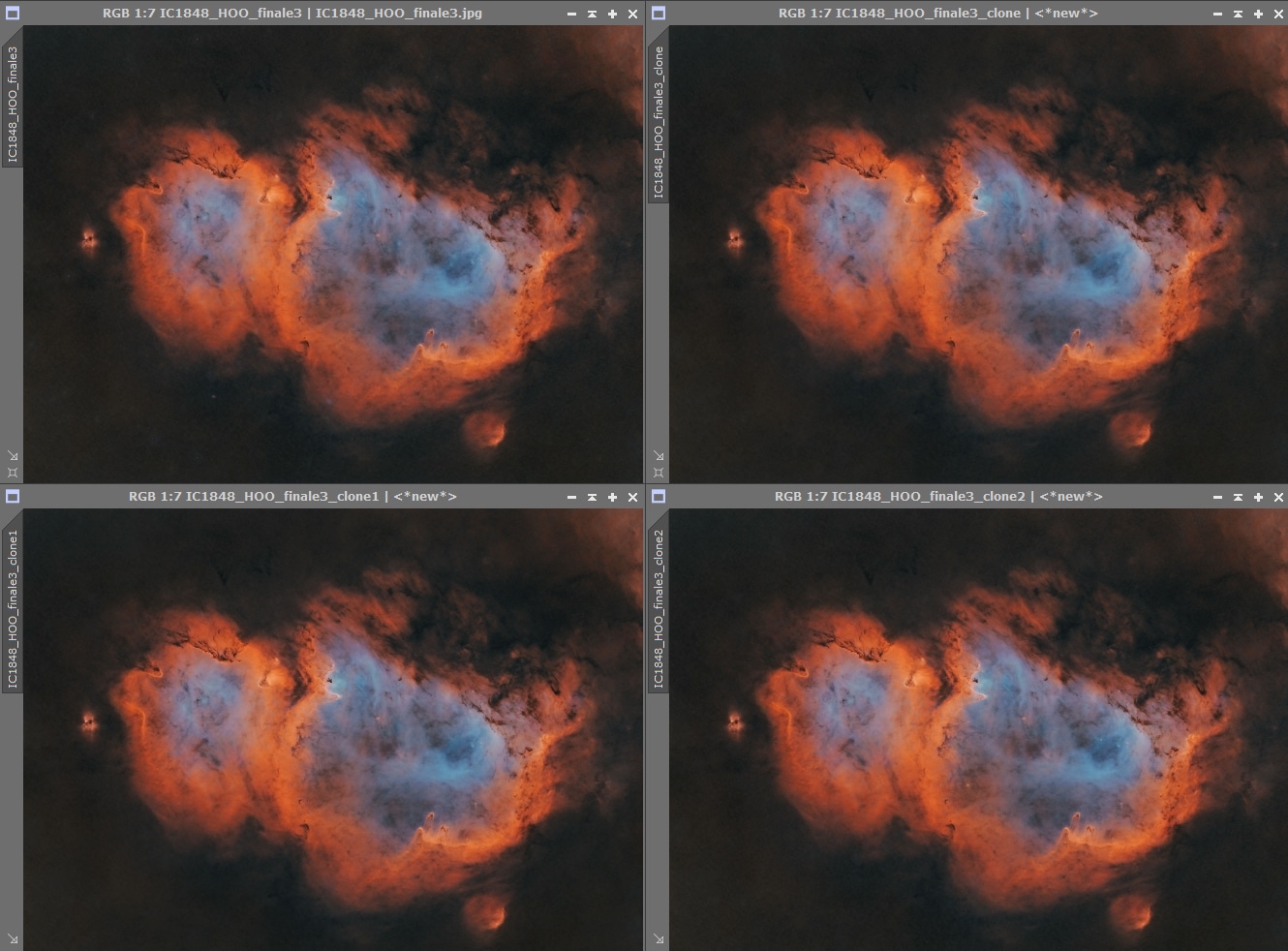
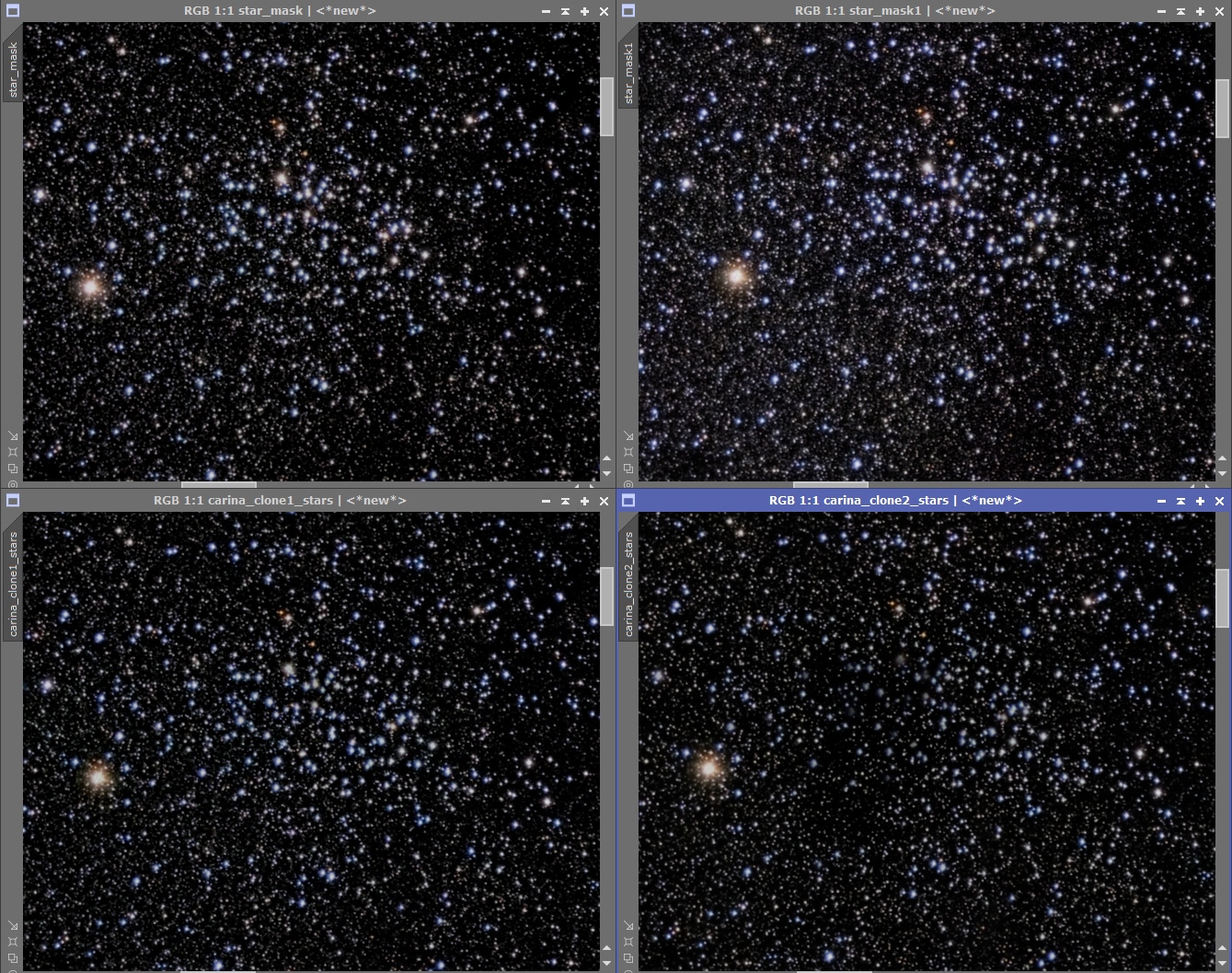
Starnet vs StarXTerminator : le match !
Pour réaliser une image starless simplement, il existe actuellement deux logiciels dominants : StarNet et son jeune challenger StarXTerminator… voici un grand test complet pour essayer de les départager !