

Nouvelles vis de serrage du trépied

Vis pointeau de maintien de la base du trépied
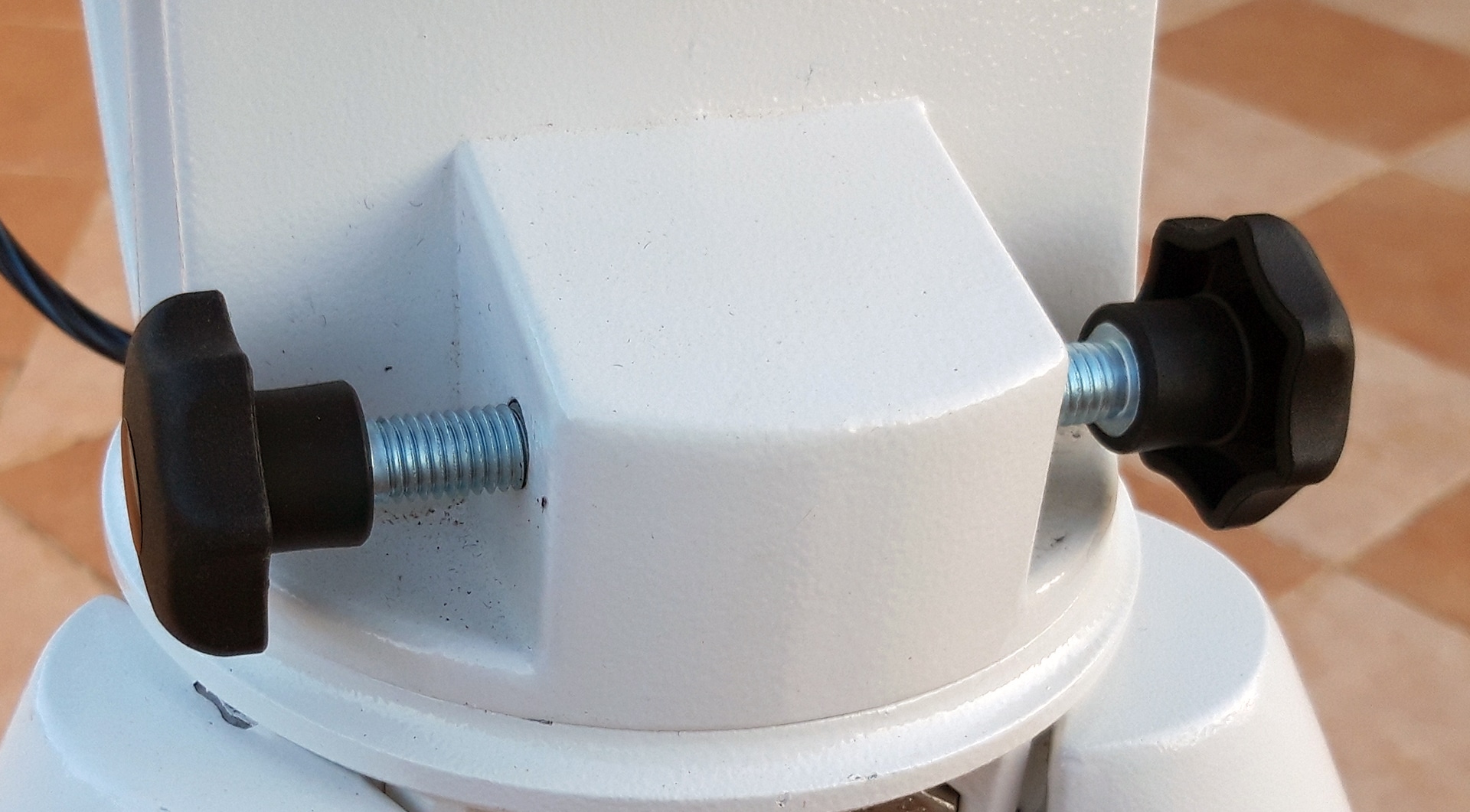
Nouvelles vis de réglage d'azimut






{kind=link}
{kind=link}




Nouvelles vis de serrage du trépied
Vis pointeau de maintien de la base du trépied
Nouvelles vis de réglage d'azimut


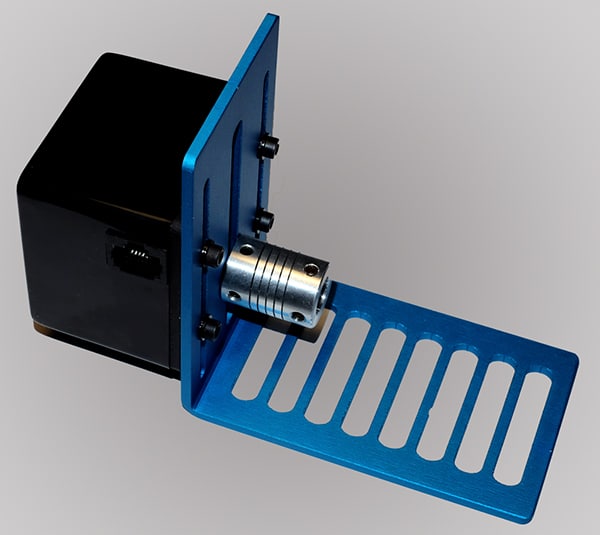
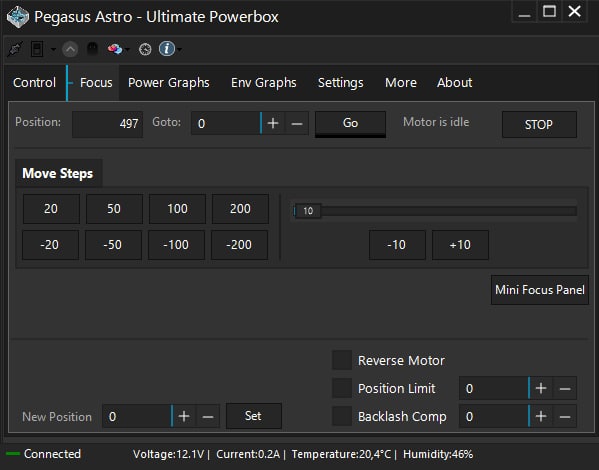
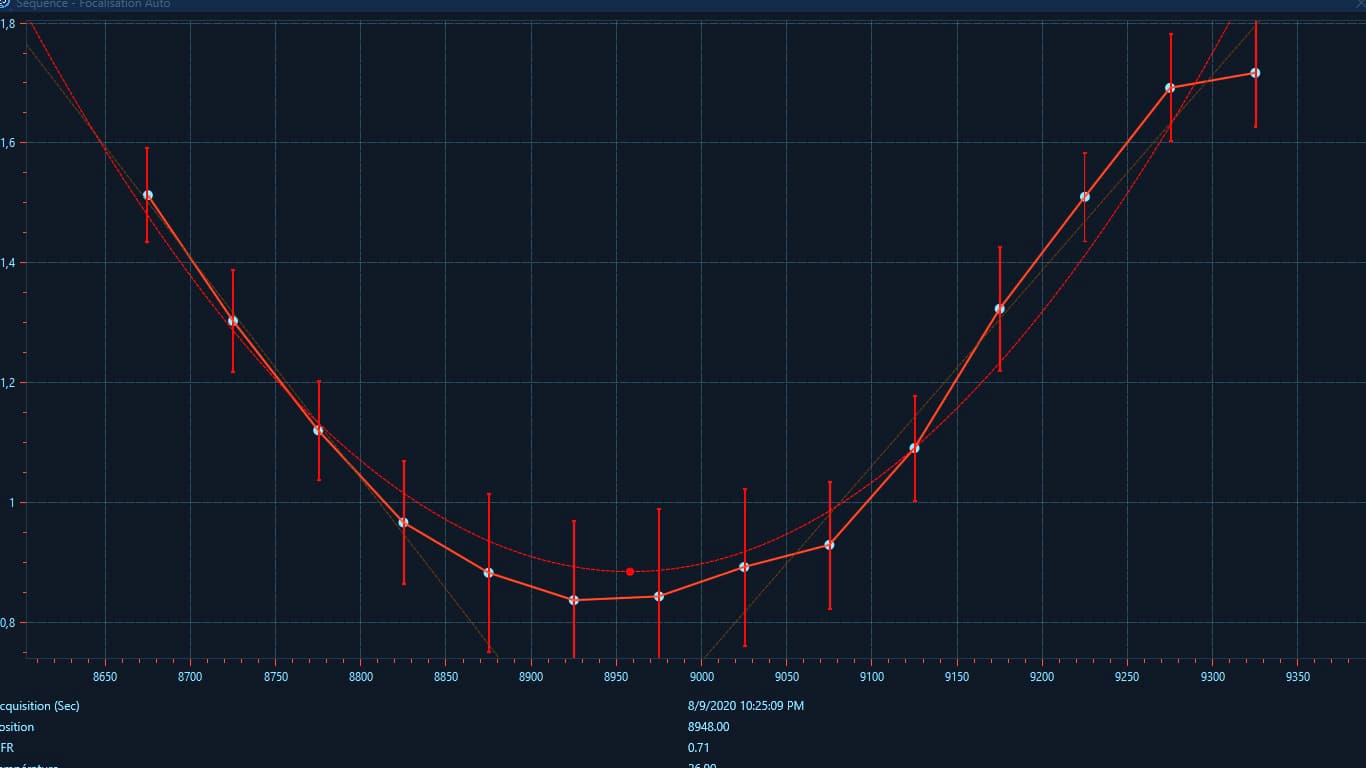
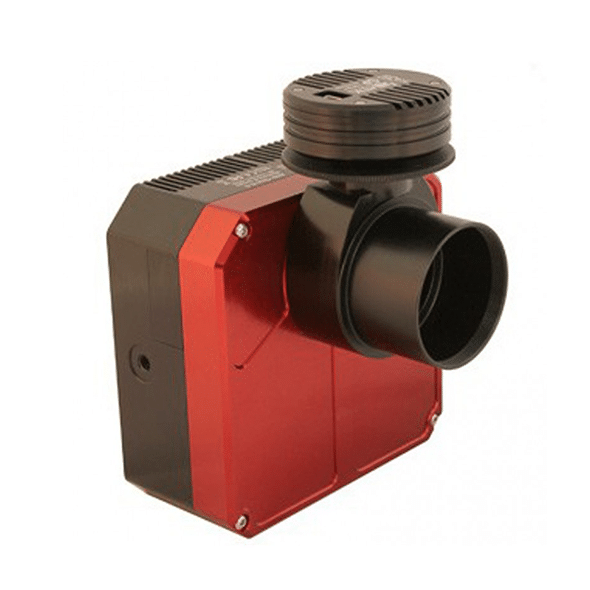
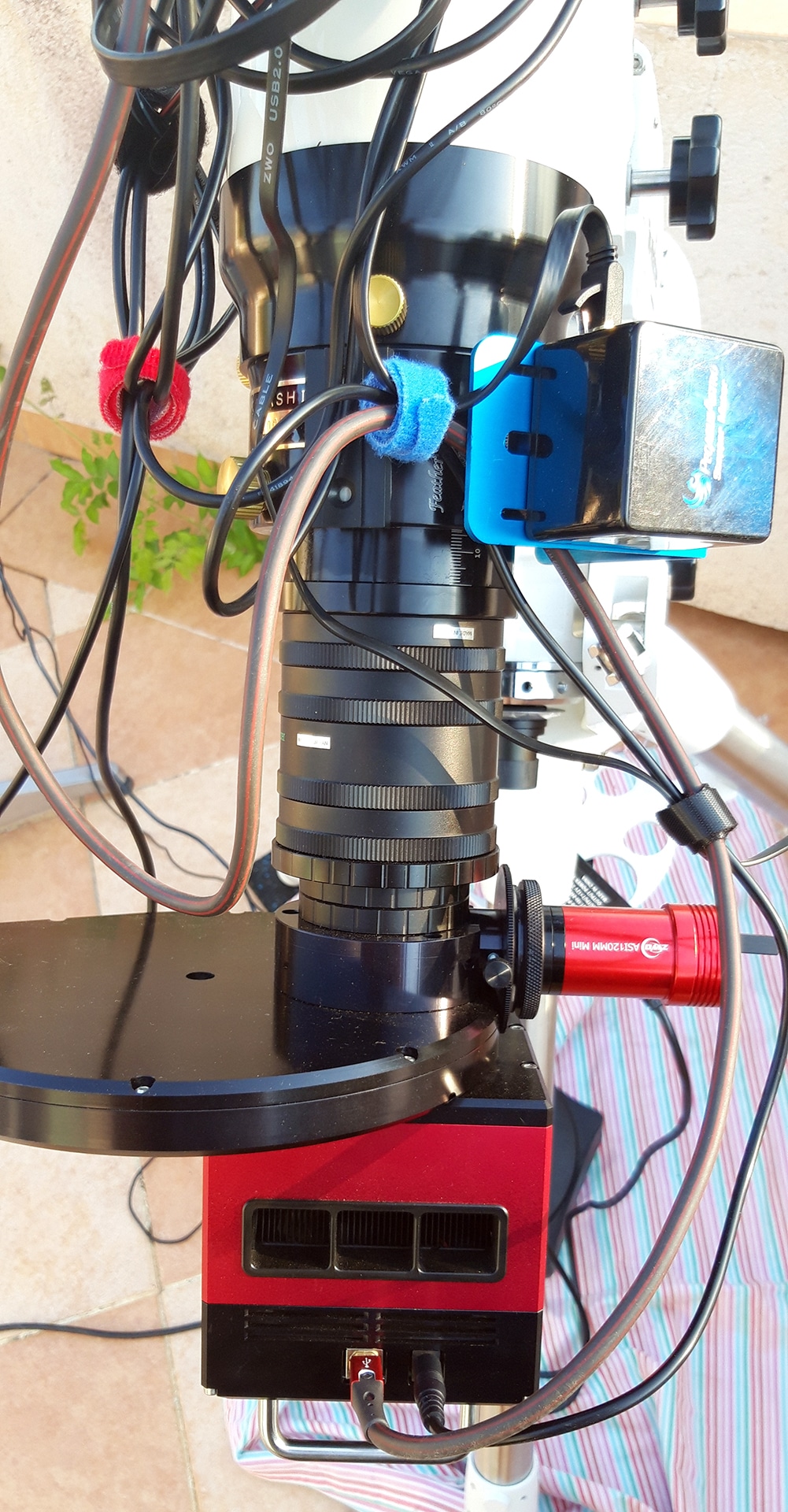
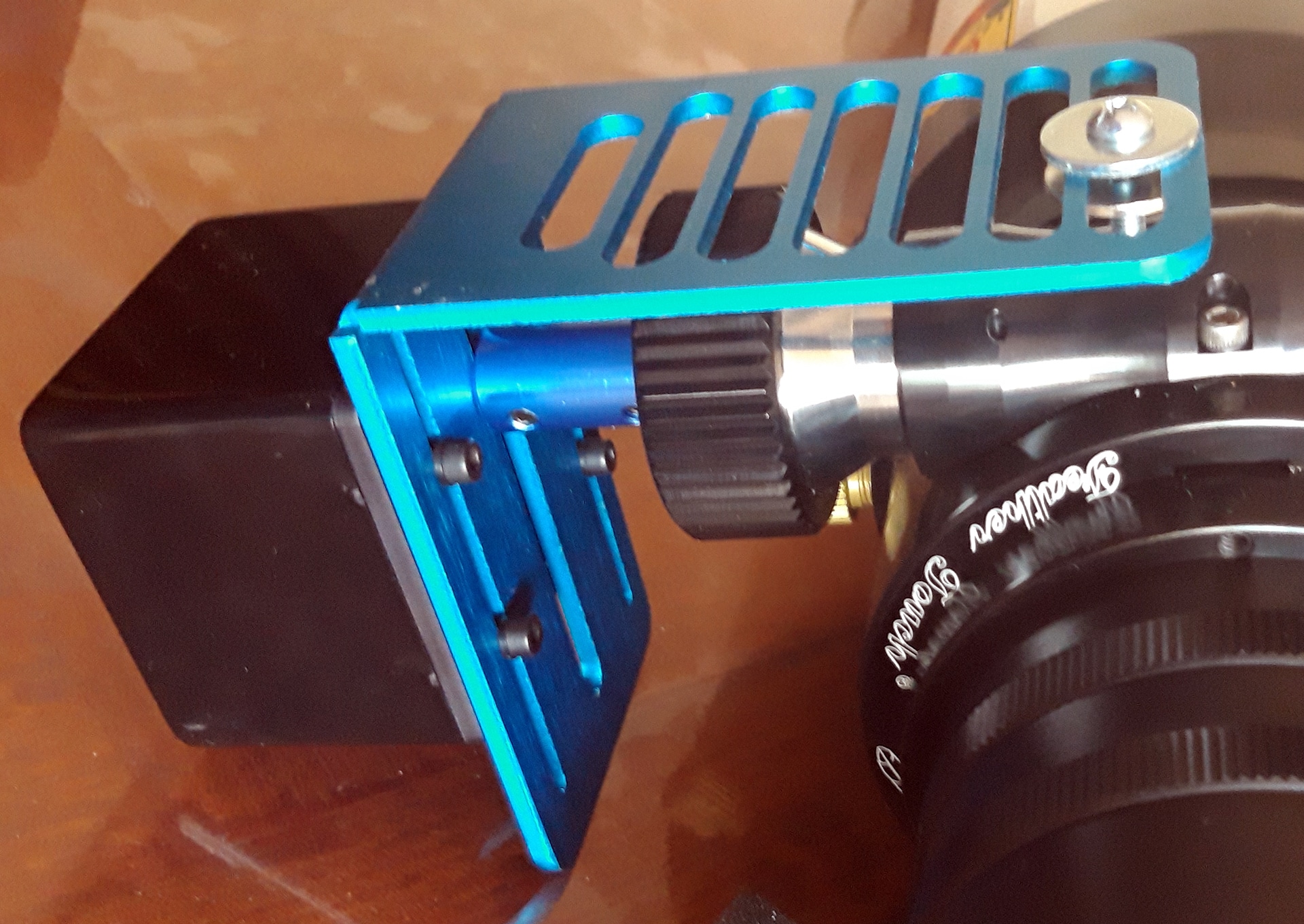
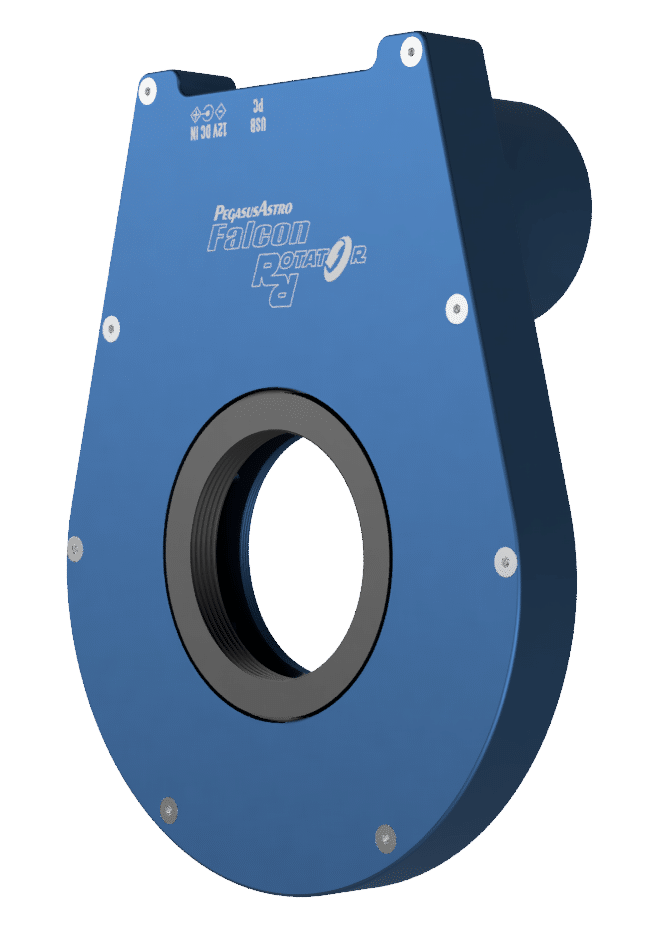
Une nouvelle caméra et un nouveau train optique intégrant un rotateur de champ… le setup est désormais quasi-totalement automatisé pour les séances d’acquisition !

« Vous (oui, vous !) pouvez soutenir Photon Millenium ! » Vous appréciez Photon Millenium et peut-être même le consultez-vous régulièrement ? Vous souhaitez soutenir mon travail et contribuer au développement du site ? Vous avez amélioré vos traitements grâce aux tutos

Hubert Reeves nous a quitté le 13 octobre 2023. Parti rejoindre les étoiles qu’il aimait tant, il laisse les amoureux du ciel ici-bas emplis d’une infinie tristesse. Hommage à celui qui aura été une source d’inspiration pour beaucoup d’astronomes amateurs.