
« L’astronomie est une école de patience…« . L’expression se vérifie souvent et dans tous les aspects de la pratique de cette activité, y compris la sélection et la mise en oeuvre de son matériel.
Il m’aura ainsi fallu attendre 4 mois entre la réception de la caméra Atik16200 et sa première lumière ! Car si le premier prix du concours d’astrophoto organisé par Atik était cette magnifique caméra, encore fallait-il se procurer les quelques accessoires indispensables à son utilisation.
Le temps de se décider sur le matériel, d’effectuer la commande et après quelques semaines d’attente (certains éléments n’étant pas en stock…), voici enfin le matériel livré !

La caméra Atik16200 et ses accessoires : la roue à filtres, le diviseur optique, et les filtres…
Le choix des accessoires
Le choix le plus simple a été celui de la roue à filtre et du diviseur optique ; ceux proposés par Atik étant conçus dès le départ pour parfaitement s’adapter à la caméra.
Le choix des filtres, en revanche, m’a demandé plus de réflexion…
Roue à filtres et diviseur optique
La roue à filtre motorisée EFW3 est prévue pour être installée directement sur la Atik 16200, en dévissant la plaque avant de cette dernière. Cette opération permet de disposer d’un ensemble vissé parfaitement rigide et de gagner 7 millimètres de backfocus au passage…
Elle accueille 7 filtres au format 2″, montés ou non.
De la même manière, le diviseur optique Atik OAG est conçu pour se visser directement sur la roue à filtres. Malgré une épaisseur un peu trop importante, celui-ci fait l’affaire pour mon setup et le backfocus du réducteur Takahashi n°18, particulièrement tolérant.
La caméra de guidage AtikGP, utilisée également sur le diviseur optique de la AtikOne, vient compléter l’ensemble.
Une fois ces éléments assemblés, ils forment un ensemble très solide (tous les éléments sont maintenus ensemble par des vis et non assemblés par filetage successifs), et qui demeure finalement assez compact.

Caméra, RAF et DO assemblés de manière solidaire : plus besoin d’y retoucher !
Une bague de raccord est également nécessaire pour assurer la liaison entre la bague de sortie Takahashi suivant le réducteur de focale (format M72, directement vissé sur le porte-oculaire Feather Touch 3″) et le diviseur optique de la caméra.
La bague utilisée est celle conçue spécialement par Optique Unterlinden et fabriquée par l’atelier mécanique Euraméca à Colmar. Elle dispose d’un filetage court M54x0,75 côté caméra, et d’une épaisseur réduite de 2mm afin de limiter le tirage optique. Elle n’engendre par ailleurs aucun vignetage dans le chemin optique.
Au final, l’ensemble (caméra – roue à filtres – diviseur optique – bagues – réducteur – instrument) est totalement solidaire et vissé ; ce qui confère une très grande stabilité et solidité au montage, avec un risque de flexions et/ou de décalage sur l’axe optique (« tilt ») très réduit.
Un doute subsiste cependant sur la qualité de la correction apportée par le réducteur, dans la mesure où le tirage mécanique total est de 88,5mm au lieu de 84,7mm, qui est la distance optimale recommandée (en tenant compte de l’épaisseur des filtres).
Ce type d’assemblage permet de gagner un temps précieux sur le terrain puisqu’aucun réglage n’est nécessaire… ce qui est toujours particulièrement appréciable en nomade ! 🙂

Chemin optique entre le réducteur et la caméra exempt de vignettage.
Par ailleurs, ces accessoires sont parfaitement compatibles avec les dimensions du capteur (35mm de diagonale) et la taille des filtres (50,8mm de diamètre), puisque le diamètre minimal des bagues de raccord est de 54mm. Aucun vignettage n’est donc engendré dans le chemin optique.
Mon objectif est de réduire au minimum les montages et démontages de ces éléments qui sont désormais solidaires entre eux.
J’ai pris de grandes précautions lors de l’assemblage pour éviter tout dépôt de poussières ou toute trace de doigt… l’idée est donc désormais de ne plus rien démonter afin que ces différents éléments (hublot du capteur, filtres, diviseur optique) demeurent parfaitement propres aussi longtemps que possible ! Il n’y a en effet rien de plus gênant qu’une grosse poussière se traduisant par des flats altérés, qui peuvent s’avérer sources de difficultés lors du prétraitement (léger bougé ou légère rotation du PO…).
Se pose donc la question du transport de ces éléments assemblés, car l’ensemble n’est pas des plus minces ! J’ai retenu à cette fin une valise Pelistorm IM2275, qui est l’une des seules de la gamme à proposer une hauteur satisfaisante sans pour autant se traduire par une longueur démesurée pour mes besoins. Cette valise très résistante est conçue à la base pour le transport de drones.
Une fois la mousse découpée minutieusement, l’ensemble se glisse parfaitement ; et il reste même encore un peu de place pour y ajouter plus tard quelques accessoires sans sacrifier à la protection de la caméra.

La caméra, la RAF et le DO bien protégés dans leur nouvel écrin…
Les filtres
Le choix le plus difficile a été celui des filtres…
Pour la AtikOne, j’avais retenu des filtres Astronomik, tant pour le LRGB que pour le SHO, dans la série 6nm pour ces derniers. Mais dans le cas de la One, la roue à filtre interne est située juste devant le capteur, lui-même d’une taille limitée… il est donc possible d’utiliser sans risque de vignettage des filtres de 1,25″ montés, ce qui représente des économies importantes puisque le prix d’un filtre est directement lié à sa taille (toutes autres qualités égales par ailleurs).
Pour la 16200 et son capteur de bien plus grande taille (4 fois plus grand), il est nécessaire de passer à une taille supérieure… et donc bien plus onéreuse : jusqu’à 1500€ le filtre narrowband dans certaines marques !
Parmi les grandes marques de filtres – et en excluant d’office les copies chinoises de moins bonne facture – on peut citer Astrodon (les plus réputés mais excessivement onéreux), Astronomik (plus abordables et sans concession sur la qualité), Chroma (clones d’Astrodon à prix – un peu – plus abordable) ou encore Baader (très bon rapport qualité/prix sans défauts optiques).

Les 7 filtres montés dans la RAF : les filtres Baader présentent une asymétrie entre les deux faces (la plus réfléchissante coté instrument).
C’est finalement sur les Baader que mon choix s’est porté, pour l’ensemble de la série L-R-G-B et S-H-O ; dans la mesure où la cohérence de l’ensemble des filtres permet de gérer plus facilement la mise au point lors des changements de filtres (épaisseur identique).
Ce qui m’a décidé pour retenir les filtres Baader est – outre leur prix plus accessible – leur nouvelle série « Ultra-Narrowband ».

Alors que leurs filtres narrowband classiques présentent une bande passante de 7/8nm (équivalent aux meilleurs filtres de chez Astronomik à 6nm), cette nouvelle série propose des filtres plus restrictifs, qui se rapprochent de ceux proposés par Astrodon (3/5 nm), avec des bandes passantes de 3,5nm pour le filtre Ha, et 4,5nm pour les filtres OIII et SII.
Dommage que la bande passante ne soit pas harmonisée totalement à 3,5nm comme pour les séries Astrodon (surtout pour le OIII), mais cela n’est pas rédhibitoire. Je n’ai pas encore vu beaucoup d’images réalisées avec ces filtres, mais les quelques tests qui ont été réalisés montrent des performances conformes aux spécifications avancées, avec une transmission tout à fait satisfaisante. Le passage au 3,5nm dans la raie Ha devrait j’espère me permettre des résultats améliorés sur cette couche essentielle !
Ci-contre, une animation réalisée à partir de différentes images réalisées par un amateur et publiées sur Astrobin, avec les filtres Baader 35nm, 7nm et 3,5nm.
On constate – sans surprise – une nette différence entre les filtres 35nm et 7nm. La différence entre les filtres 7nm et 3,5nm est plus subtile, mais toutefois perceptible, avec des étoiles encore plus atténuées et la meilleure mise en valeur des nébulosités les plus ténues.
Pour ce qui concerne les filtres LRGB, la série Baader est relativement proche des « Deep Sky » chez Astronomik, avec un recoupement de la raie OIII pour les filtres verts et bleus. La séparation est un peu moins tranchée entre le vert et le rouge que chez Astronomik, mais cela reste satisfaisant et les images réalisées avec ces filtres prouvent une restitution de couleurs franche et marquée.
La EFW3 acceptant des filtres de 2″ montés ou de 50,8mm non-montés, c’est cette seconde option que j’ai retenue, afin de limiter au maximum tout risque de vignettage.
Les tests préliminaires
Après l’assemblage des différents matériels, le premier test (en intérieur…) avait simplement pour objectif de vérifier que tout fonctionne correctement, tant au niveau mécanique qu’informatique).
Naturellement, ce genre de test n’a pour but que d’anticiper les principaux réglages (équilibrage, câblage…) et de prévenir les plus gros problèmes qui seraient bloquant une fois sur le terrain (oubli d’une pièce, problèmes d’alimentation, drivers informatiques…) mais ne saurait en aucun cas se substituer à un essai grandeur nature, sur les étoiles !

Mieux vaut prévoir ces tests sans enfants dans les parages… 😉
Premier constat : la 16200 et ses accessoires sont nettement plus lourds et volumineux que la petite AtikOne !
Cela oblige, d’une part, à déporter plus vers l’avant la platine et le tube optique afin d’équilibrer correctement l’ensemble (ce qui n’est pas spécialement difficile car le triplet optique de la TSA102 est lui-même assez lourd…), et d’autre part, à orienter la roue à filtre de manière à prévenir au mieux le risque de butée contre les trépieds lors du passage au zénith.
Cette seconde opération ne pose cependant pas de soucis particulier et est même facilitée par la nécessité de remonter le tube optique pour l’équilibrage… Il suffit ensuite d’orienter correctement le porte-oculaire rotatif pour minimiser les risques de butée.
Deuxième constat – le plus important : tout semble fonctionner sans problème notable. Il ne reste plus qu’à confirmer ce constat optimiste sous le ciel nocturne !
Troisième constat : le passage de la AtikOne et de son système « tout en un » à la 16200 pose un autre souci : les câbles se multiplient !

Attention au trépied lors du passage au zénith ! 🙂
Alors qu’un seul câble d’alimentation et un câble USB suffisent pour la One (qui dispose d’un hub USB pour la caméra de guidage), ce sont désormais 2 câbles d’alimentation (caméra et RAF) et 3 câbles USB (caméra, RAF, caméra de guidage) qui sont nécessaires… C’est pourquoi j’ai opté pour un boitier qui permet de centraliser l’ensemble des câbles d’alimentation et USB : j’en parle ici.
Premier test sur le ciel
J’ai profité d’un WE sur la côte Atlantique pour tester la caméra et ce montage.
Rien de spécial à relever côté installation, en dehors d’un équilibrage un peu plus compliqué à bien trouver qu’avec la AtikOne (et cet aspect est essentiel pour que la monture AZEQ-6 délivre de bonnes performances…).
Quelques petits soucis avec le hub USB non-alimenté : les prises USB supplémentaires m’obligent à charger davantage le hub qui ne délivre pas une puissance d’alimentation suffisante pour faire tourner la caméra de guidage… mais ce petit souci est vite résolu en branchant la caméra de guidage directement sur le PC et en basculant d’autres interfaces moins gourmandes en énergie sur le hub (interface EQMod pour la monture, RAF…) et en supprimant les prises USB non indispensables (joystick et souris).
Après ces quelques réglages (toujours pénibles mais bien loin des soucis que j’avais connu lors de la première utilisation de la AtikOne avec beaucoup de problèmes de drivers…), tout est bien configuré : le logiciel de planétarium, le suivi, etc.

Le setup et sa « montagne de câbles »…
Bon point pour la Atik16200 par rapport à la AtikOne : le système de refroidissement du capteur est bien plus performant, avec un delta max de 50° contre seulement 37° pour sa petite sœur. En pratique cependant, le delta recommandé est de 45° (contre 30° pour la One). Malgré la forte chaleur ce jour-là (avec toujours 25° à minuit…), je peux descendre la température de la caméra à une valeur très basse (-20° sans forcer), ce qui permet de limiter fortement le bruit thermique sur les images.
Grande différence par rapport à la One : la présence d’un obturateur mécanique, et surtout le temps de chargement des images bien plus important (18s en bin1). La mise au point se fait cependant sans grande difficulté, avec un fenêtrage réduit ; de même que le cadrage en utilisant le bin4.
Enfin la première image apparaît ! Toujours une grande émotion et surtout une satisfaction de voir que la caméra délivre une image convenable ! 🙂
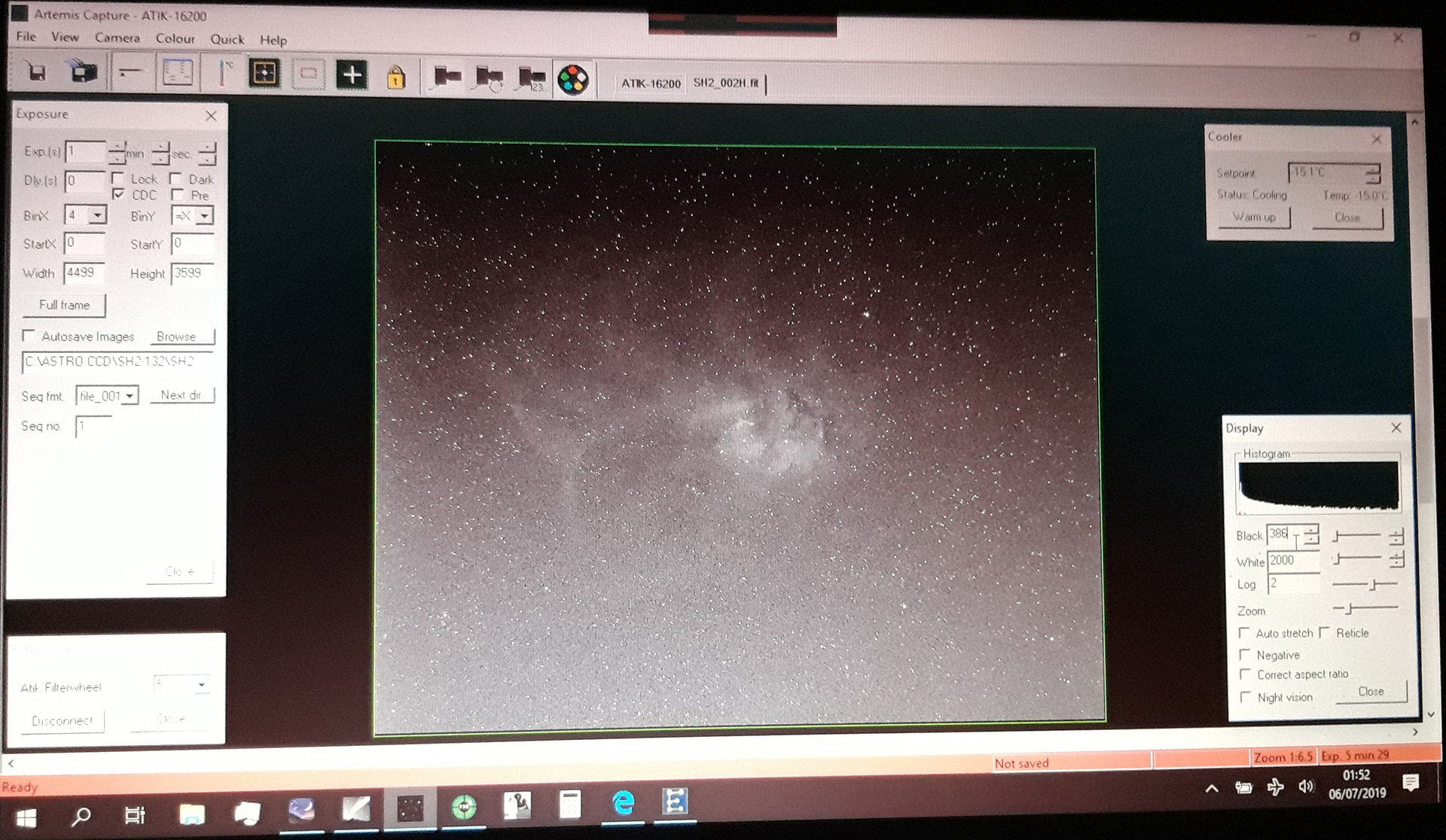
Enfin la première lumière ! 900s de pose en Ha sur Sh2-132. Juste le temps de réaliser que c’est mal cadré ! 🙂
D’autant que pour la première lumière, je n’ai pas choisi une cible particulièrement lumineuse : la nébuleuse Sharpless 132, dans la constellation de Céphée. Une nébuleuse qui s’étend sur près de 2 degrés mais de magnitude surfacique très faible : un bon test pour le champ délivré par la caméra et sa sensibilité.
Le temps de pose de 900s avec le filtre Ha 3,5nm donne une image qui s’annonce prometteuse : l’ensemble de la nébuleuse est bien visible avec un beau signal dans la partie la plus lumineuse et un signal significatif dans les zones les plus ténues.
Niveau suivi, aucun souci : l’AZEQ6 délivre avec ce setup plus lourd et plus délicat à équilibrer des performances tout à fait satisfaisantes et comparables aux résultats habituellement obtenus avec le montage de la AtikOne. Sur cette nuit de test, et malgré un vent bien présent et quelques rafales, la précision de suivi sur 6h est de 0,6″ RMS en moyenne (pour un échantillonnage de 2,06″/px). Les brutes de 900s ne montrent donc aucune dérive ou défaut de suivi, et il sera parfaitement envisageable de doubler la durée des poses unitaires à 1800s au besoin…
Analyse de la première image
Malgré l’absence de darks et de bias, je procède à mon retour de WE à l’empilement de mes 18 images Ha brutes (soit 4h30 de pose).

Empilement rapide des premières images brutes (sans DOF…) : quelques heures sup’ sont à prévoir !
Naturellement, l’absence de calibration ne permet pas une analyse rigoureuse de l’image, en terme de bruit et de signal, mais cette première image permet déjà de tirer quelques enseignements.
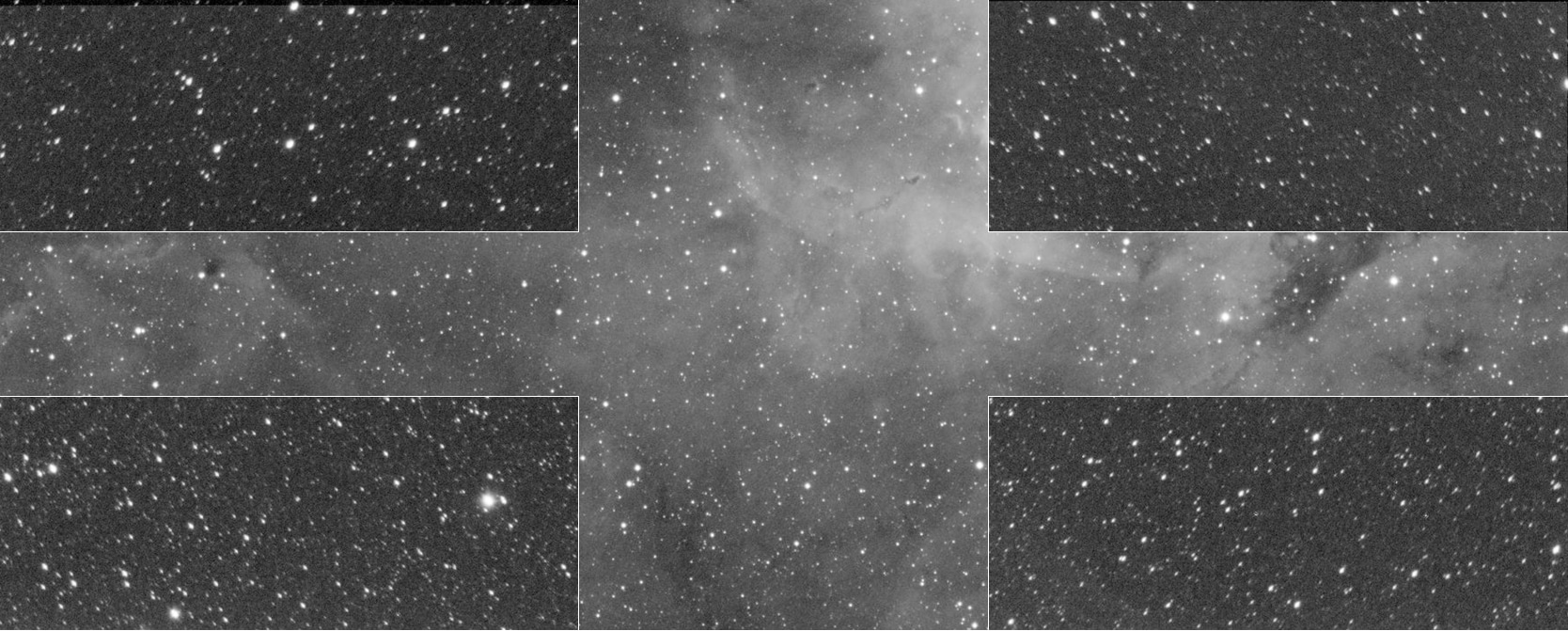
En premier lieu, que le champ exploitable est parfaitement conforme à ce qu’on est en droit d’attendre au vu des spécifications de l’optique et de la caméra : le vignettage reste très mesuré et l’aspect des étoiles est globalement correct sur les bords de l’image.
Cependant, la visualisation de l’image full à 100% montre bien que la correction du champ n’est pas parfaite : les étoiles sont sensiblement déformées dans les coins.
Rien de dramatique mais cela n’est clairement pas optimal : la faute sans doute aux 4mm de tirage supplémentaires par rapport à la distance préconisée par Takahashi…
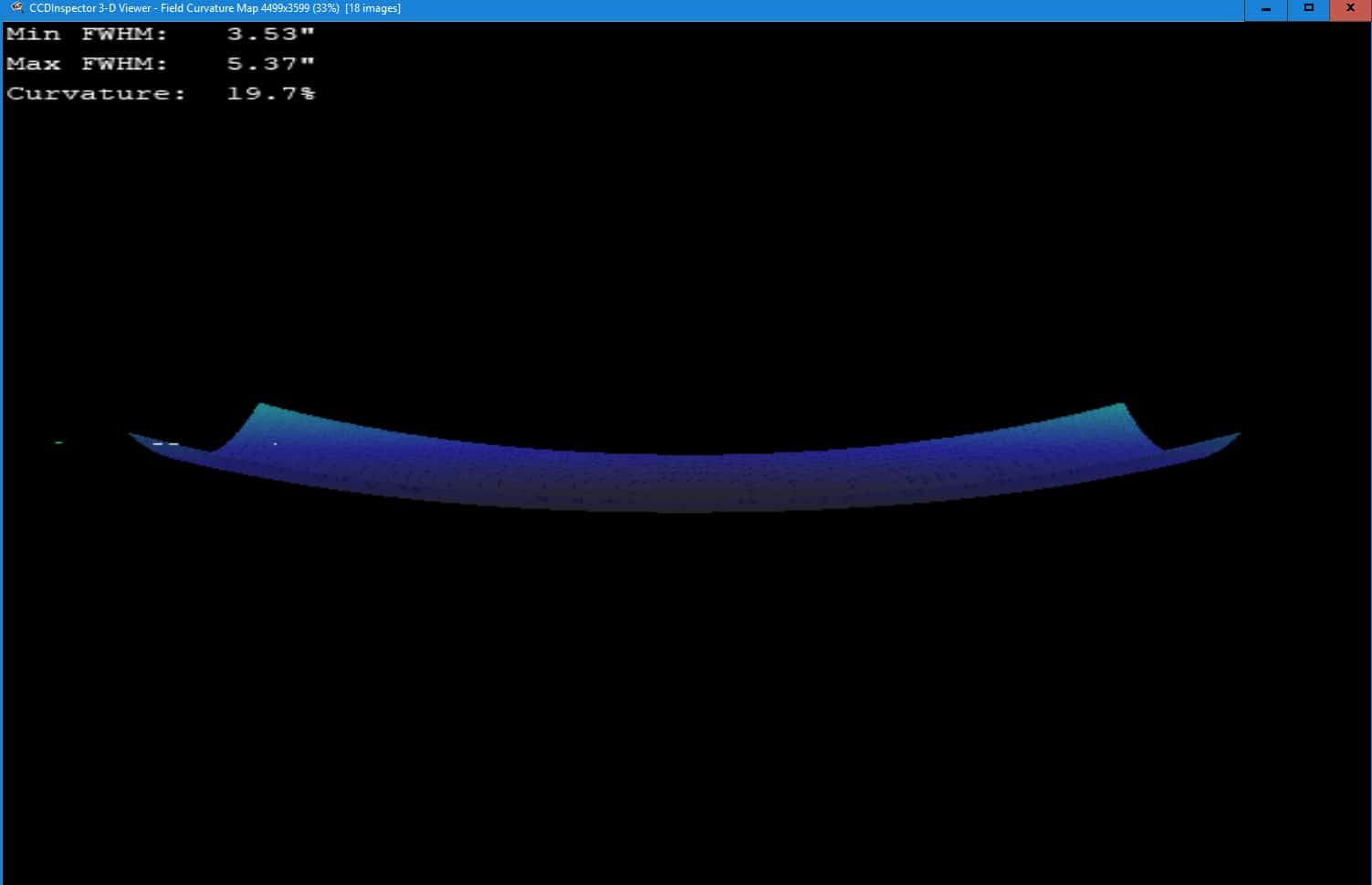
Cette déformation se confirme après avoir passé l’image sous l’analyse de CCDInspector : le champ n’est pas parfaitement plan, ce qui entraîne une déformation des étoiles sur le bord de champ.
Avec un taux de courbure de champ de quasiment 20%, la FWHM (c’est à dire la « finesse » des étoiles) est 67% plus élevée dans les coins qu’au centre de l’image.
Même si cette déformation est raisonnable, elle n’en demeure pas moins significative…
Dans l’idéal, la déformation devrait être réduite à moins de 50% de la valeur actuelle (soit un taux de courbure de 10% maximum) pour conserver des étoiles ponctuelles sur tout le champ photo…
Je me suis donc attelé à réduire le tirage mécanique et j’ai procédé à différents tests pour parvenir à une correction plus acceptable.
Après quelques essais avec différentes bagues allonges, je parviens à obtenir un tirage mécanique de 84,5mm, soit seulement 0,2mm de moins que la distance optimale recommandée.
Les premiers essais réalisés avec ce montage semblent confirmer l’amélioration, avec un taux de courbure ramené à 8,9% ! A cette valeur, la finesse des étoiles dans les coins est largement améliorée, avec seulement 7% d’écart avec le centre (soit quasiment 10x mieux qu’avec le montage précédent).

Nouvelle bague / ancienne bague 
Dans la mesure où ces essais ont été réalisés depuis mon balcon parisien, il reste encore toutefois à confirmer cette amélioration avec des poses longues sous un ciel de qualité… et à procéder à quelques ajustements afin de déterminer avec précision – au millimètre près – quel réglage est le plus optimal.
Si ce montage constitue une solution acceptable à court terme, il me faudra toutefois envisager, une fois cette distance optimale définitivement validée, la fabrication d’une bague sur-mesure de qualité, afin de garantir la planéité du champ et l’absence de tilt.
Malgré l’absence de champ parfaitement corrigé, qui va demander quelques petits ajustements, le bilan de cette « première lumière » reste très positif ! J’ai hâte de pouvoir commencer les choses sérieuses avec ce nouveau setup, et notamment de tester les performances de cette caméra en LRGB.
Je vous dis donc à bientôt pour – je l’espère – la première image finalisée !



